 400-099-1872
400-099-1872





多(duō)智能體自主協同方案
實驗室建設
(基于E-PUCK2微型地面群體智能協作系統實驗室建設)
實驗室建設
(基于E-PUCK2微型地面群體智能協作系統實驗室建設)
項目類型:《多(duō)智能體自主協同技術》
項目名稱:多(duō)智能體分(fēn)布式群體協作系統
項目編号:ZNJ-MAS_2020
制作單位:賽途(北京)智能科技有限公司
目 錄
一、 實驗室建設目的(de)
二、 技術背景
三、 實驗室概況
四、 應用(yòng)領域
五、 研究方向
六、 基于E-PUCK發表核心期刊
七、 項目效益
八、 群體智能協同系統
九、 配置方案及報價
十、 群體智能軟件案例
十一、 多(duō)智能體實驗室效果圖
10.1 群體智能實驗平台效果圖
10.2 群體智能實驗平台三視圖
10.3 實驗室整體效果圖
10.4 群體智能實驗室刨面圖
10.5 多(duō)智能體協同效果圖
10.6 多(duō)智能體協同效果圖
一、 實驗室建設目的(de)
二、 技術背景
三、 實驗室概況
四、 應用(yòng)領域
五、 研究方向
六、 基于E-PUCK發表核心期刊
七、 項目效益
八、 群體智能協同系統
九、 配置方案及報價
十、 群體智能軟件案例
十一、 多(duō)智能體實驗室效果圖
10.1 群體智能實驗平台效果圖
10.2 群體智能實驗平台三視圖
10.3 實驗室整體效果圖
10.4 群體智能實驗室刨面圖
10.5 多(duō)智能體協同效果圖
10.6 多(duō)智能體協同效果圖
一、 實驗室建設目的(de)
近些年來(lái),由于仿生學、計算(suàn)機科學、人(rén)工智能、控制科學、社會學等多(duō)個(gè)學科交叉和(hé)滲透發展,多(duō)智能體協同控制技術越來(lái)越受到衆多(duō)學校的(de)廣泛關注,已成爲當前控制學科以及人(rén)工智能領域的(de)研究熱(rè)點。構建一套前沿技術和(hé)應用(yòng)前景廣泛的(de)群體智能教學與實訓平台,不僅能夠很好的(de)實現如編隊控制、一緻性控制、聚散控制等多(duō)智能體協同控制算(suàn)法,打造國際一流水(shuǐ)準的(de)群體智能機器人(rén)試驗平台,也(yě)是學校注重理(lǐ)論和(hé)實踐相結合的(de)培養學生綜合素質以及實踐動手能力的(de)主要方式,是傳播和(hé)産生更多(duō)科技新知識建立科學實驗與創新的(de)實驗基地。
二、 技術背景
多(duō)智能體協同控制的(de)發展從集中、集散式控制、現場(chǎng)中心控制、智能控制,日益複雜(zá)化(huà)、智能化(huà),且具備了(le)智能體(Agent)的(de)基本特征,控制方式日益走向多(duō)智能控制單元協同工作的(de)模式,整個(gè)控制系統已經具備了(le)多(duō)智能體系統(Multi-Agent System, MAS)的(de)雛形,基于多(duō)智能體的(de)分(fēn)布式協同系統是現代智能控制技術發展的(de)方向。近年來(lái)國内外高(gāo)校對(duì)多(duō)智能體協同技術研究日益增多(duō)。
三、 實驗室概況
本實驗室通(tōng)過采用(yòng)E-puck2桌面型群體智能機器人(rén),在小型實驗場(chǎng)地内通(tōng)過光(guāng)電投影(yǐng)定位技術實現機器人(rén)位置感知和(hé)數據通(tōng)訊,實現“群體智能”研究目标。該套實驗平台能夠爲項目研究算(suàn)法提供較爲充足的(de)研究條件,及軟、硬件開發環境支撐,可(kě)以實現涵蓋單體智能控制、多(duō)智能體協同控制、網絡通(tōng)訊、協同算(suàn)法等領域的(de)相關技術内容,以及驗證多(duō)智能體協同控制理(lǐ)論和(hé)關鍵技術解決方案,爲現實生活中大(dà)規模活動與個(gè)體之間關系提供實驗模型和(hé)理(lǐ)論驗證。
四、 應用(yòng)領域
群體智能機器人(rén)是一種國際前沿的(de)人(rén)工智能研究項目,由多(duō)個(gè)小型機器人(rén)組成的(de)集群式解決系統。群體智能機器人(rén)的(de)靈感源于螞蟻、蜜蜂、魚群體等生物(wù),在沒有統一領導的(de)情況下(xià),也(yě)能合作執行大(dà)量複雜(zá)的(de)任務。群體智能機器人(rén)的(de)原理(lǐ)是,首先由一批智能小機器人(rén),先讓它們完成簡單的(de)任務,比如組建一個(gè)圖形,再在此基礎上一步疊加複雜(zá)的(de)任務,最終實現整個(gè)人(rén)工智能的(de)突破,無限接近、甚至超越人(rén)類。每一個(gè)小機器人(rén)都具有自身的(de)運動能力和(hé)有限的(de)智能水(shuǐ)平,通(tōng)過個(gè)體之間或個(gè)體與環境之間交互行爲形成高(gāo)度的(de)有組織性活動,雖然這(zhè)些交互行爲看上去非常簡單,但他(tā)們聚在一起卻能解決一些難題,完成很多(duō)單體無法完成的(de)工作。群體智能機器人(rén)的(de)運用(yòng)前景非常廣泛,包括智慧城(chéng)市、智慧醫療、智能制造等方面,在軍事戰略中也(yě)發揮巨大(dà)作用(yòng)。
五、 研究方向
在動态不可(kě)預測多(duō)智能體環境中,重點可(kě)以研究以下(xià)課題:
Ø 智能機器人(rén)運動姿态解析與控制算(suàn)法的(de)研究;
Ø 智能機器人(rén)自主感知、組網算(suàn)法的(de)研究;
Ø 多(duō)機器人(rén)目标協同定位算(suàn)法的(de)研究;
Ø 多(duō)機器人(rén)自主動态決策與路徑規劃算(suàn)法的(de)研究;
Ø 多(duō)機器人(rén)編隊組合解散、仿生學行爲模拟算(suàn)法的(de)研究等;
Ø 智能機器人(rén)運動姿态解析與控制算(suàn)法的(de)研究;
Ø 智能機器人(rén)自主感知、組網算(suàn)法的(de)研究;
Ø 多(duō)機器人(rén)目标協同定位算(suàn)法的(de)研究;
Ø 多(duō)機器人(rén)自主動态決策與路徑規劃算(suàn)法的(de)研究;
Ø 多(duō)機器人(rén)編隊組合解散、仿生學行爲模拟算(suàn)法的(de)研究等;
六、 基于E-PUCK發表核心期刊
| 序号 | 論文出處 | 課題 |
| 1 | IEEE |
Persistent and Robust Execution of MAPF Schedules in Warehouses 在倉庫中連續穩定地裏執行MAPF計劃 |
| 2 | IEEE |
Finding Consensus Without Computation 無算(suàn)法條件下(xià)自主聚集行爲 |
| 3 | Natural Robotics Lab |
Occlusion-Based Cooperative Transport with a Swarm of Miniature Mobile Robots 多(duō)耦合系統下(xià)的(de)微型輪式移動器群體協同傳輸 |
| 4 | Natural Robotics Lab |
Self-organized aggregation without computation 無算(suàn)法條件下(xià)的(de)自組織群集行爲 |
| 5 | Natural Robotics Lab |
Clustering Objects with Robots That Do Not Compute 無算(suàn)法條件下(xià)多(duō)機器人(rén)聚集行爲 |
七、 項目效益
通(tōng)過構建群體智能機器人(rén)研究平台,可(kě)以提升人(rén)工智能科研深度,提高(gāo)學生綜合能力水(shuǐ)平,形成人(rén)工智能專業人(rén)才培養新模式、産教融合實踐與服務體系以及國際交流合作新格局,建成學校滿意、國内一流、國際知名的(de)高(gāo)标準科研平台。
1. 人(rén)才培養指标:以多(duō)學科交叉融合爲特色綜合應用(yòng)平台,以創新實訓爲手段、以團隊協作爲組織模式,以培養綜合知識應用(yòng)爲目标,每學年滿足50人(rén)以上學生的(de)學習(xí)與實訓需求。
2. 經濟效益指标:有效節省經費,降低教學科研成本,優化(huà)資源配置,提升教學設備的(de)使用(yòng)率和(hé)成果轉化(huà)率。
3. 社會效益指标:滿足師生對(duì)群體智能的(de)學習(xí)與實訓需求,支撐教師開展科學研究和(hé)教學成果展示,提升學生們的(de)就業水(shuǐ)平,增強社會競争力。
4. 教學資源建設:可(kě)申請群體智能國家級精品在線開放課程,申請嵌入式多(duō)智能體協同校級“金課”等。
5. 服務滿意度指标:爲師生提供“随時(shí)”、“随地”、“随心”實驗與實訓環境,師生使用(yòng)滿意率達到99%。
6. 打造國際交流平台:擴大(dà)與國際教學交流,提升師資隊伍國際視野,以國家“一帶一路”倡議(yì)爲契機,探索群體智能國際化(huà)理(lǐ)念,招收“一帶一路”國家留學生,開發和(hé)輸出人(rén)工智能專業教學标準和(hé)技術培訓标準。提升人(rén)才培養國際化(huà)水(shuǐ)平,提升國際競争力與影(yǐng)響力
1. 人(rén)才培養指标:以多(duō)學科交叉融合爲特色綜合應用(yòng)平台,以創新實訓爲手段、以團隊協作爲組織模式,以培養綜合知識應用(yòng)爲目标,每學年滿足50人(rén)以上學生的(de)學習(xí)與實訓需求。
2. 經濟效益指标:有效節省經費,降低教學科研成本,優化(huà)資源配置,提升教學設備的(de)使用(yòng)率和(hé)成果轉化(huà)率。
3. 社會效益指标:滿足師生對(duì)群體智能的(de)學習(xí)與實訓需求,支撐教師開展科學研究和(hé)教學成果展示,提升學生們的(de)就業水(shuǐ)平,增強社會競争力。
4. 教學資源建設:可(kě)申請群體智能國家級精品在線開放課程,申請嵌入式多(duō)智能體協同校級“金課”等。
5. 服務滿意度指标:爲師生提供“随時(shí)”、“随地”、“随心”實驗與實訓環境,師生使用(yòng)滿意率達到99%。
6. 打造國際交流平台:擴大(dà)與國際教學交流,提升師資隊伍國際視野,以國家“一帶一路”倡議(yì)爲契機,探索群體智能國際化(huà)理(lǐ)念,招收“一帶一路”國家留學生,開發和(hé)輸出人(rén)工智能專業教學标準和(hé)技術培訓标準。提升人(rén)才培養國際化(huà)水(shuǐ)平,提升國際競争力與影(yǐng)響力
八、 群體智能協同系統
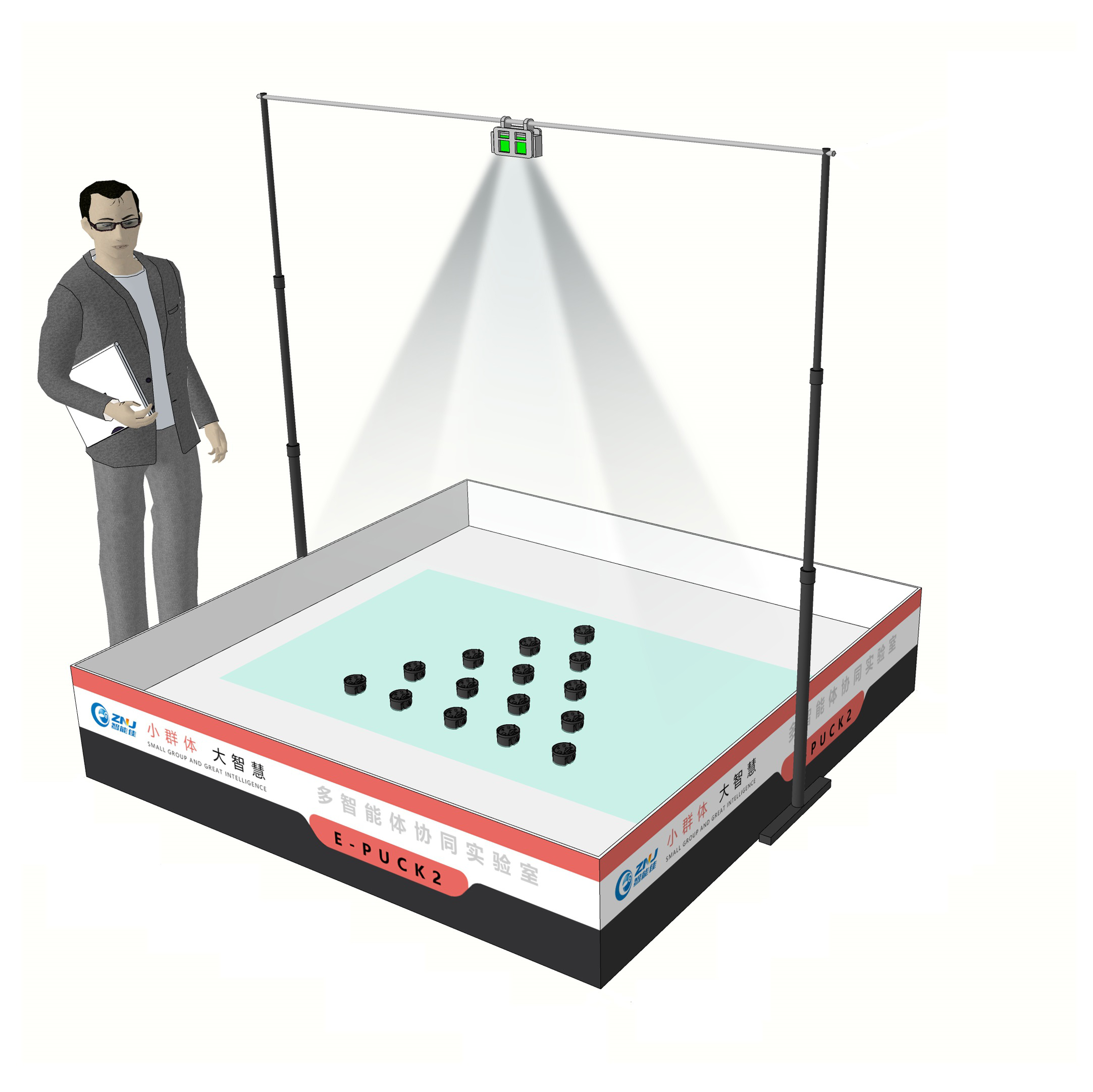
群體智能協同實驗平台分(fēn)爲高(gāo)頻(pín)投影(yǐng)儀系統、無線通(tōng)訊控制系統、群體智能決策軟件系統、機器人(rén)系統四大(dà)部分(fēn)。
機器人(rén)是實驗控制對(duì)象,是算(suàn)法實現的(de)載體;高(gāo)頻(pín)投影(yǐng)儀系統是機器人(rén)位置感知與定位的(de)主要系統,通(tōng)過高(gāo)頻(pín)光(guāng)譜采集機器人(rén)位置、朝向、速度等數據信息;無線通(tōng)訊控制系統負責上位機和(hé)機器人(rén)之間的(de)通(tōng)訊,連接數據的(de)采集和(hé)數據的(de)發送,使整個(gè)系統成爲一個(gè)閉環。群體智能決策軟件系統相當于整個(gè)系統的(de)大(dà)腦(nǎo),綜合收集到的(de)信息控制機器人(rén)之間的(de)運動關系,經過決策後發出機器人(rén)執行的(de)指令。
1. 高(gāo)頻(pín)投影(yǐng)儀系統
高(gāo)頻(pín)投影(yǐng)儀系統可(kě)用(yòng)于三維重建、三維測量、平面定位等。三位重建和(hé)測量主要方法是通(tōng)過投影(yǐng)儀将結構光(guāng)投影(yǐng)至被測物(wù)體上,并通(tōng)過攝像機進行拍(pāi)攝,并根據三維坐(zuò)标和(hé)二維坐(zuò)标的(de)轉換得(de)到其深度,而平面定位則是将經過格雷碼調制過後圖片序列,以高(gāo)頻(pín)(3000HZ及以上)形式連續播放,而接收到光(guāng)信号的(de)設備,按照(zhào)格雷碼編碼的(de)方式進行解碼,從而求出當前所處的(de)平面坐(zuò)标。
2. 無線通(tōng)訊控制系統
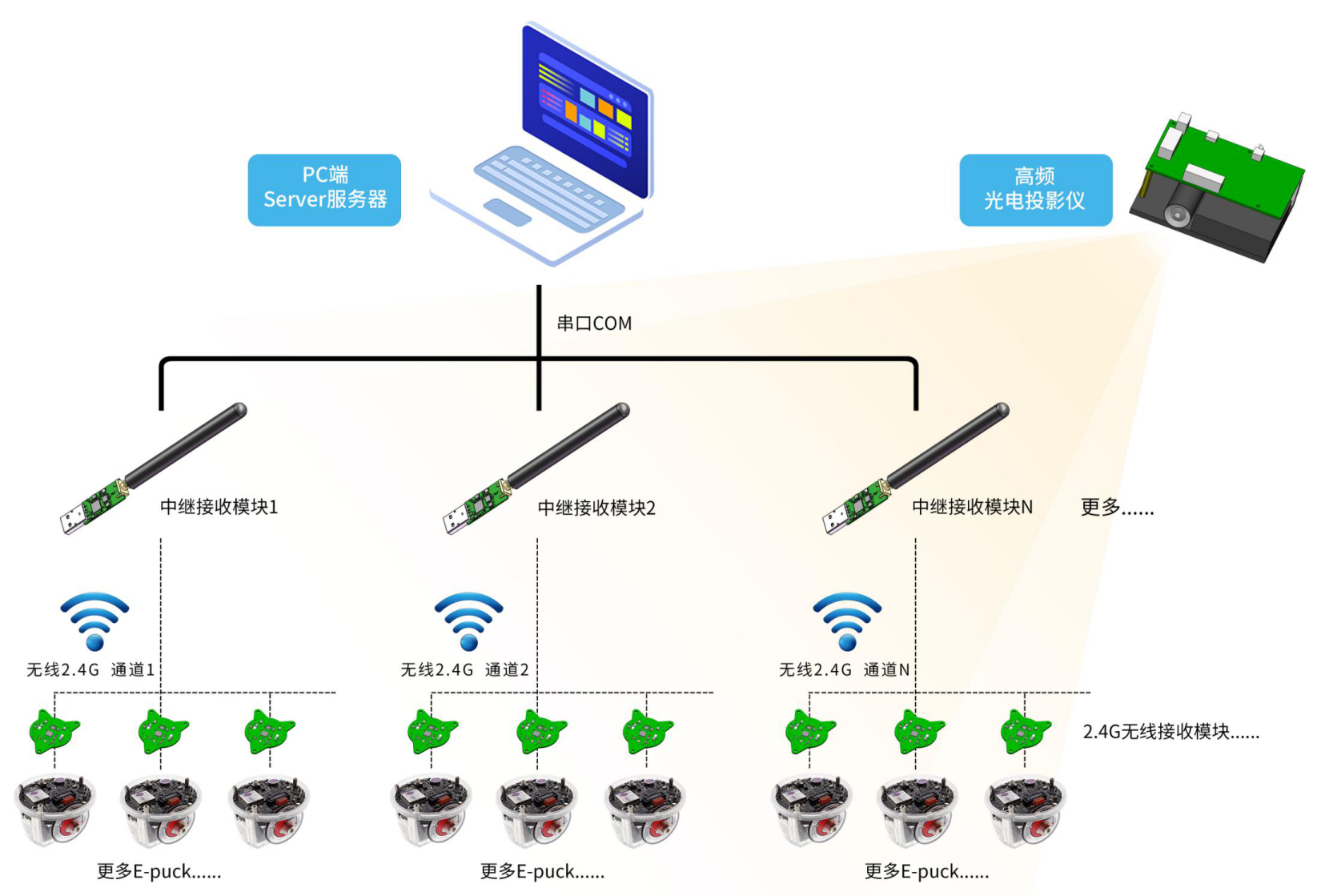
群體智能無線通(tōng)訊控制系統含單體智能無線接收模塊和(hé)中繼接收模塊。單體智能無線接收模塊含智能定位和(hé)智能組網兩大(dà)部分(fēn),主要加裝在微型機器人(rén)上,用(yòng)于微型機器人(rén)的(de)定位和(hé)通(tōng)信。它的(de)定位采用(yòng)結構光(guāng)的(de)格雷碼解碼的(de)方式,定位精度能夠達到8mm。通(tōng)信組網采用(yòng)的(de)是2.4GHZ射頻(pín)通(tōng)信技術,可(kě)以實現一對(duì)多(duō)通(tōng)信,發射接收頻(pín)率最大(dà)可(kě)以達到2Mb/s。中繼接收模塊實現一個(gè)模塊管理(lǐ)同一頻(pín)段的(de)單體智能無線接收模塊,實現一對(duì)多(duō)的(de)通(tōng)信,同時(shí)将下(xià)發和(hé)接收的(de)信息通(tōng)過USB接口給出到第三方需要處理(lǐ)數據的(de)設備。
3. 群體智能決策軟件系統
群體智能決策軟件系統用(yòng)于多(duō)機器人(rén)群體行爲決策的(de)仿真,結合通(tōng)信接收中繼闆和(hé)單體機器人(rén),也(yě)可(kě)實現多(duō)個(gè)智能體硬件之間的(de)自主協作。它從系統構成分(fēn)爲應用(yòng)層、仿真層、服務層、通(tōng)信層四部分(fēn)。應用(yòng)層含機器人(rén)群體三種協作模式:圖形模式、手繪模式、指揮棒模式、二次開發模式。仿真層含機器人(rén)節點的(de)新增、删除,機器人(rén)的(de)路徑規劃,機器人(rén)目标點設置等。服務層包含軟件系統獲取機器人(rén)本體的(de)位置和(hé)狀态,通(tōng)訊層包含軟件系統通(tōng)過USB接口與中繼接收闆之間的(de)通(tōng)信。服務層與通(tōng)訊層需要接收中繼闆以及機器人(rén)本體進行聯調。
機器人(rén)是實驗控制對(duì)象,是算(suàn)法實現的(de)載體;高(gāo)頻(pín)投影(yǐng)儀系統是機器人(rén)位置感知與定位的(de)主要系統,通(tōng)過高(gāo)頻(pín)光(guāng)譜采集機器人(rén)位置、朝向、速度等數據信息;無線通(tōng)訊控制系統負責上位機和(hé)機器人(rén)之間的(de)通(tōng)訊,連接數據的(de)采集和(hé)數據的(de)發送,使整個(gè)系統成爲一個(gè)閉環。群體智能決策軟件系統相當于整個(gè)系統的(de)大(dà)腦(nǎo),綜合收集到的(de)信息控制機器人(rén)之間的(de)運動關系,經過決策後發出機器人(rén)執行的(de)指令。
1. 高(gāo)頻(pín)投影(yǐng)儀系統
高(gāo)頻(pín)投影(yǐng)儀系統可(kě)用(yòng)于三維重建、三維測量、平面定位等。三位重建和(hé)測量主要方法是通(tōng)過投影(yǐng)儀将結構光(guāng)投影(yǐng)至被測物(wù)體上,并通(tōng)過攝像機進行拍(pāi)攝,并根據三維坐(zuò)标和(hé)二維坐(zuò)标的(de)轉換得(de)到其深度,而平面定位則是将經過格雷碼調制過後圖片序列,以高(gāo)頻(pín)(3000HZ及以上)形式連續播放,而接收到光(guāng)信号的(de)設備,按照(zhào)格雷碼編碼的(de)方式進行解碼,從而求出當前所處的(de)平面坐(zuò)标。
2. 無線通(tōng)訊控制系統
群體智能無線通(tōng)訊控制系統含單體智能無線接收模塊和(hé)中繼接收模塊。單體智能無線接收模塊含智能定位和(hé)智能組網兩大(dà)部分(fēn),主要加裝在微型機器人(rén)上,用(yòng)于微型機器人(rén)的(de)定位和(hé)通(tōng)信。它的(de)定位采用(yòng)結構光(guāng)的(de)格雷碼解碼的(de)方式,定位精度能夠達到8mm。通(tōng)信組網采用(yòng)的(de)是2.4GHZ射頻(pín)通(tōng)信技術,可(kě)以實現一對(duì)多(duō)通(tōng)信,發射接收頻(pín)率最大(dà)可(kě)以達到2Mb/s。中繼接收模塊實現一個(gè)模塊管理(lǐ)同一頻(pín)段的(de)單體智能無線接收模塊,實現一對(duì)多(duō)的(de)通(tōng)信,同時(shí)将下(xià)發和(hé)接收的(de)信息通(tōng)過USB接口給出到第三方需要處理(lǐ)數據的(de)設備。
3. 群體智能決策軟件系統
群體智能決策軟件系統用(yòng)于多(duō)機器人(rén)群體行爲決策的(de)仿真,結合通(tōng)信接收中繼闆和(hé)單體機器人(rén),也(yě)可(kě)實現多(duō)個(gè)智能體硬件之間的(de)自主協作。它從系統構成分(fēn)爲應用(yòng)層、仿真層、服務層、通(tōng)信層四部分(fēn)。應用(yòng)層含機器人(rén)群體三種協作模式:圖形模式、手繪模式、指揮棒模式、二次開發模式。仿真層含機器人(rén)節點的(de)新增、删除,機器人(rén)的(de)路徑規劃,機器人(rén)目标點設置等。服務層包含軟件系統獲取機器人(rén)本體的(de)位置和(hé)狀态,通(tōng)訊層包含軟件系統通(tōng)過USB接口與中繼接收闆之間的(de)通(tōng)信。服務層與通(tōng)訊層需要接收中繼闆以及機器人(rén)本體進行聯調。
九、 配置方案
| 序号 | 産品名稱 | 圖片 | 介紹 | 單價 |
| 1 |
E-PUCK 2 機器人(rén) |
 |
E-PUCK 2爲高(gāo)端桌面型嵌入式機器人(rén),可(kě)以在有限的(de)空間内進行大(dà)數量智能機器人(rén)群體協作實驗,其在實用(yòng)性、穩定性、拓展性、接口開放性等方面有極大(dà)的(de)優勢。可(kě)在開展已知或未知環境下(xià)的(de)任務動态分(fēn)配研究,任務預測與任務分(fēn)解研究,以及異構大(dà)規模多(duō)耦合任務研究等方面具有領先優勢。E-PUCK2雖然體積小,但配有多(duō)種先進的(de)傳感器以及多(duō)種擴展接口,例如:WIFI、藍牙、紅外傳感器、IMU、麥克風、揚聲器、LED燈、全局攝像頭、USB接口、CAN接口、串口等,内置标準的(de)Linux運行系統,提供标準C/C++語言開發環境。 配置清單: 1. 尺寸:直徑70mm,高(gāo)度45mm; 2. 重量:150g; 3. 處理(lǐ)器:32位STEm32F407; 4. 内存:192KB; 5. 傳感器: l 9軸IMU; l VGA 彩色攝像頭; l 8個(gè)紅外線傳感器; l 距離傳感器; l 4個(gè)全向麥克風; l 闆内建揚聲器; 6. 通(tōng)訊:USB、WIFI、藍牙; 7. 運動速度:約15cm/秒; 8. 一個(gè)5Wh 可(kě)充電锂電池; 9. 電池:3.7V,锂電池1800mAh; 10. 續航約:45分(fēn)鐘(zhōng); 11. 适合做(zuò)嵌入式多(duō)機器人(rén)協作平台。 |
|
| 可(kě)選配件 | 擴展闆 PiPUCK |
 |
l 采用(yòng)樹莓派zero w核心處理(lǐ)器; l 配有micro SD; l 内置标準的(de)Linux運行系統。 |
|
| 全局攝像頭V3 |
 |
l 5M像素彩色攝像頭,360°均勻像素分(fēn)布的(de)抛物(wù)面環視鏡; l 分(fēn)辨率:640×480; l 幀數:18fps; l 配1600 mAh锂電池; l 可(kě)以連接樹莓派Zero W; l 适用(yòng)于圖像處理(lǐ),例如斑點、顔色和(hé)物(wù)體檢測。 |
||
| RGB顯示闆 |
 |
l 9個(gè)RGB發光(guāng)二極管; l 8個(gè)紅外線; l PIC18F6722微控制器(數據表); l 可(kě)以識别256個(gè)不同機器人(rén)ID号; l 每個(gè)LED彼此獨立顯示,既可(kě)以單獨控制也(yě)可(kě)以混合變色。 |
||
| 2 | 高(gāo)頻(pín)定位系統 |
 |
高(gāo)頻(pín)定位系統包含兩個(gè)子系統,光(guāng)引擎系統和(hé)驅動系統,以及散熱(rè)器和(hé)風扇等設備。 l 光(guāng)引擎包括:紅色、綠色和(hé)藍色光(guāng)譜;以及912×1140鑽石像素0.45英寸WXGA DMD。光(guāng)引擎在15瓦功率下(xià)功耗産生約150流明(míng)光(guāng)照(zhào)強度。 l 驅動系統含LED驅動電路,DLPC350 DMD控制器,電源管理(lǐ)電路,DVI TO RGB轉換與TFP401和(hé)一個(gè)32MB閃存。 |
|
| 3 | 智能無線接收模塊 |
 |
智能無線接收模塊含智能定位和(hé)智能組網兩部分(fēn)。 l 智能定位:利用(yòng)兩個(gè)光(guāng)電傳感器調制的(de)格雷碼結構光(guāng),進行解碼計算(suàn)定位坐(zuò)标和(hé)定位角度。 l 智能組網:内置射頻(pín)通(tōng)信芯片,實現機器人(rén)通(tōng)訊組網。 |
|
| 4 | 中繼接收闆 |
 |
中繼接收闆是單體智能硬件模塊的(de)管理(lǐ)者,它能夠實時(shí)查看同一頻(pín)段的(de)單體智能協作模塊的(de)狀态,下(xià)發一些設置命令,它包含管理(lǐ)決策和(hé)智能組網兩部分(fēn)。管理(lǐ)決策對(duì)第三方設備硬件上提供USB接口,軟件上提供相應的(de)查詢、連接、組網等函數接口。智能組網硬件功能與單體智能協作硬件系統保持一緻。 | |
| 5 | 機器人(rén)測試場(chǎng)地 |
 |
Ø 平台尺寸:2x2米; Ø 攝像頭支架:可(kě)調高(gāo)度1.5-2米; Ø 便攜式補光(guāng)燈:2個(gè); Ø 高(gāo)密度闆:4塊1.9x1.9x0.015m; Ø 主體材質:鋁合金支撐骨架; Ø 護闆:8塊PCB防護闆; Ø PVC背景闆:4張(黑(hēi)色/白色); Ø 3M強力超薄雙面膠帶:1卷; Ø 場(chǎng)地組裝手冊:1份; Ø 安裝工具:螺絲、螺絲刀(dāo)等 |
|
| 6 | 群體智能決策軟件系統 | 軟件 |
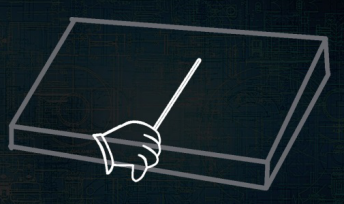
群體智能決策軟件系統可(kě)以根據研究課題需要完成相應的(de)追捕實驗、圍捕實驗、協同逃生實驗等,爲了(le)更好的(de)配合學校完成各種實驗,智能佳爲其提供三種基礎的(de)協同實驗案例和(hé)代碼: 1. 圖形模式:根據E-PUCK2數量不同,可(kě)以自适應組合完成如圓形、三角形、五角星形、正方形等形狀; 2. 手繪模式:可(kě)以實時(shí)根據研究人(rén)員(yuán)在觸摸屏上繪制圖案,并匹配E-PUCK2的(de)數量和(hé)位置信息,完成相應圖形或文字組合; 3. 随動模式:研究人(rén)員(yuán)通(tōng)過定位指揮棒控制多(duō)台E-PUCK2列隊跟随其運動。 3.軟件提供服務: 1) 提供整套系統二次開發代碼; 2) 提供速度、角度、位置控制接口; 3) 提供3D仿真軟件培訓; 4) 提供一次2天免費上門培訓服務; |
十、 群體智能軟件案例
| 編号 | 概要 | 内容 | 展示方式 |
| 1 | 案例模式 | 提供三種群體智能控制模式,分(fēn)别爲圖形模式、手繪模式、随動模式 |
 |
| 2 | 圖形模式 | 根據E-PUCK2數量不同,可(kě)以自适應組合完成如圓形、三角形、五角星形、正方形等形狀; |
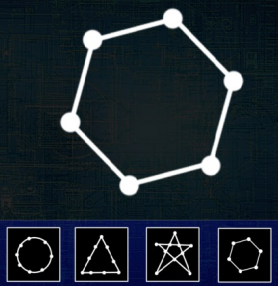 |
| 3 | 手繪模式 | 可(kě)以實時(shí)根據研究人(rén)員(yuán)在觸摸屏上繪制圖案,根據計算(suàn)E-PUCK2的(de)數量和(hé)位置信息,完成相應圖形或文字組合; |
 |
| 4 | 随動模式 | 研究人(rén)員(yuán)通(tōng)過定位指揮棒控制多(duō)台E-PUCK2列隊跟随其運動。 |
 |
| 5 | 底層代碼 | 提供底層代碼,方便學校展開更高(gāo)級别的(de)研究,例如追捕實驗、圍捕實驗、編隊實驗、一緻性實驗、聚散實驗等多(duō)智能體協同控制算(suàn)法。 | |
十一、 多(duō)智能體實驗室效果圖
11.1 群體智能實驗平台效果圖

圖2-産品效果圖
11.2 群體智能實驗平台三視圖
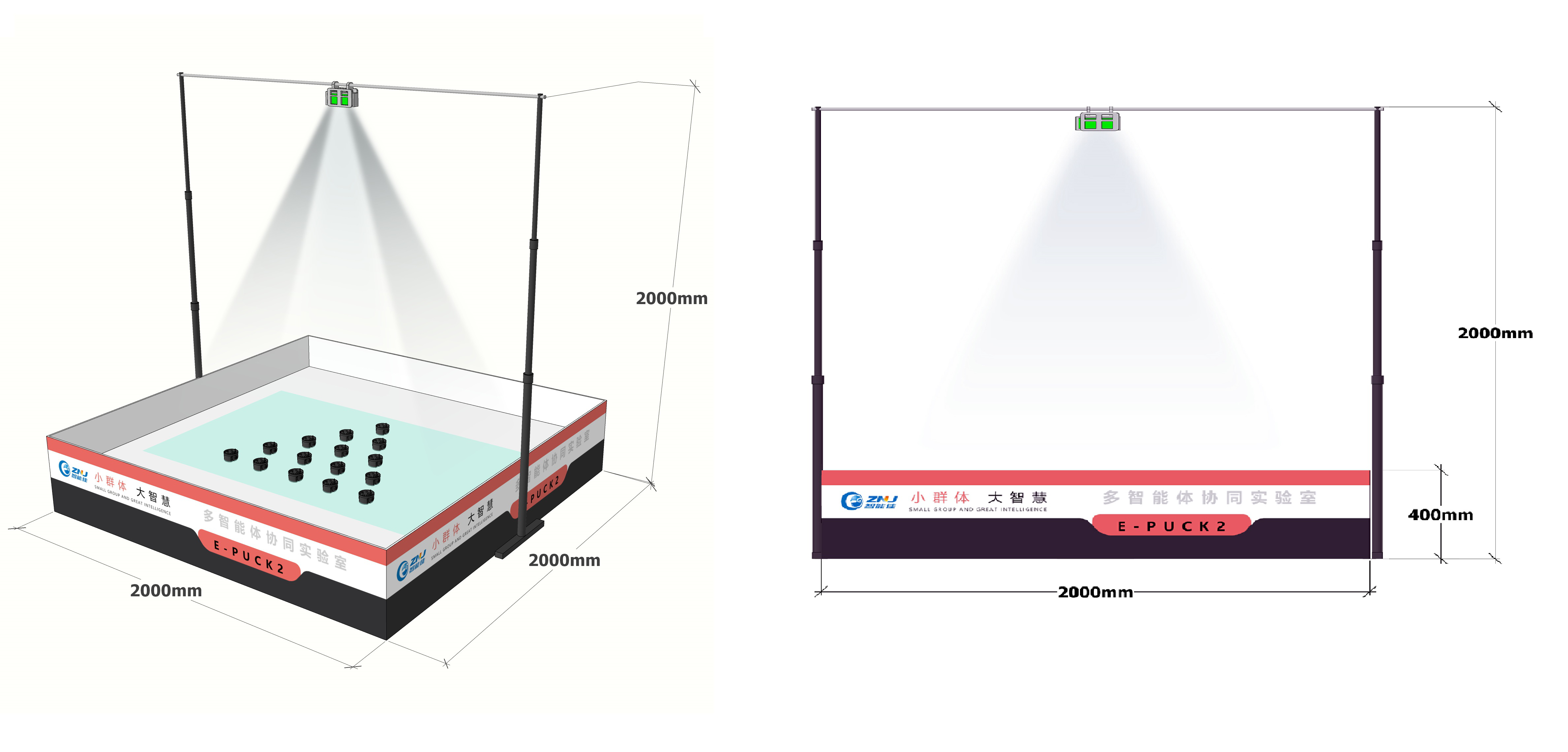
圖3-産品三視圖
11.3 實驗室整體效果圖
11.4 群體智能實驗室刨面圖
11.5 多(duō)智能體協同效果圖
11.6 多(duō)智能體協同效果圖


