 400-099-1872
400-099-1872






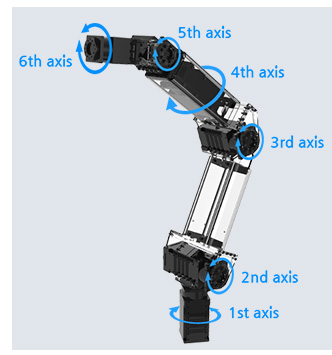
RM-P60-RNH機械臂(套裝版)用(yòng)戶可(kě)編程的(de)開源機械手系統
産品名稱:OpenMANIPULATOR-P
型号名稱:RRM-P60-RNH+底座+機械手+攝像頭
- 用(yòng)戶可(kě)編程的(de)開源機械手系統
- 易于維護和(hé)定制的(de)模塊化(huà)平台
- 無外部控制箱,重量/負載比高(gāo)
· 基于集成軟件的(de)ROBOTIS機械手控制器套件;
· OpenMANIPULATOR-P庫(運動學,軌迹和(hé)Dynamixel控制器);
· GUI程序包,用(yòng)于設置和(hé)監視控制參數;
· MoveIt!OpenMANIPULATOR-P的(de)軟件包;
· 基于Gazebo Simulator的(de)仿真包;
· 鍵盤和(hé)操縱杆的(de)遙控操作示例;

研究目的(de)

DYNAMIXEL-P的(de)功能
多(duō)合一模塊化(huà)設計
直流電機+控制器+驅動器+傳感器+擺線
針輪減速機;
緊湊
輕巧的(de)擺線針輪減速機使模塊尺寸最小。
高(gāo)輸出重量比(0.05Nm / g)
高(gāo)抗沖擊性(超過400%)
高(gāo)精度和(hé)低反沖
非接觸式(磁性)絕對(duì)編碼器(通(tōng)過
AMS)和(hé)增量編碼器,用(yòng)于精确定位;
提供的(de)性能數據由韓國實驗室認可(kě)計劃
(KOLAS)測試;
基于電流的(de)轉矩控制
高(gāo)速電流感應算(suàn)法和(hé)電流反饋控制;
三環控制,用(yòng)于電流,速度和(hé)位置反饋。
用(yòng)戶友好的(de)開發環境
提供基于C語言的(de)庫;
各種解決方案示例(C ++,LabVIEW,C#,eclipse,JAVA等)。
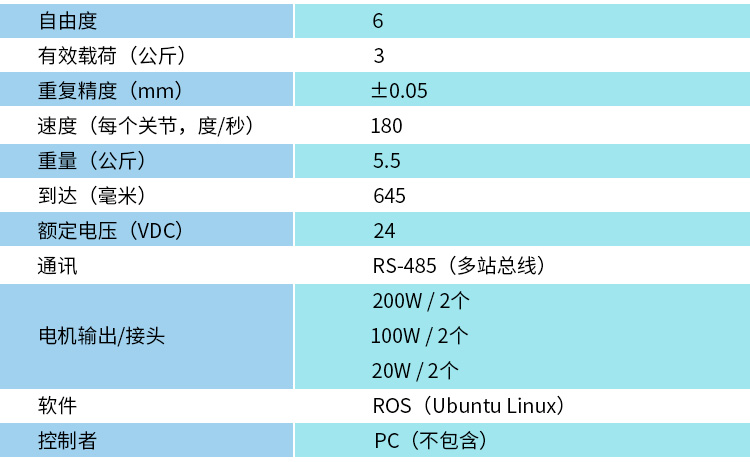
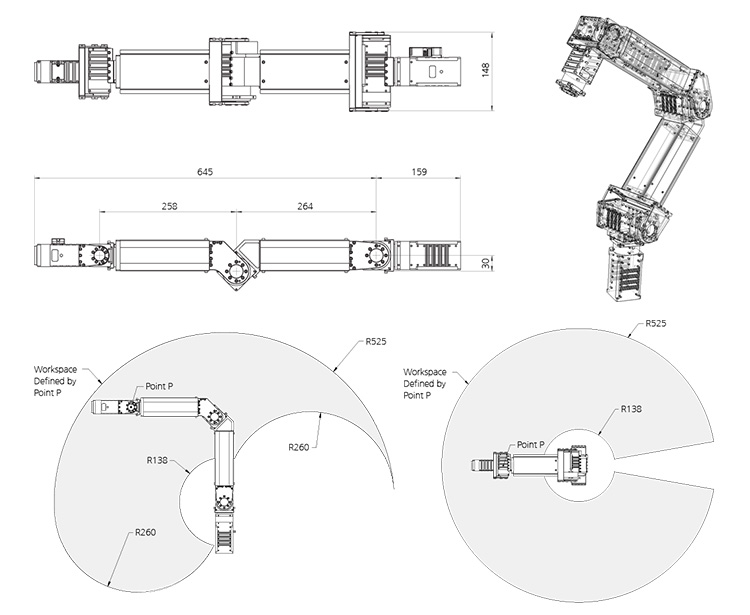
硬件參數
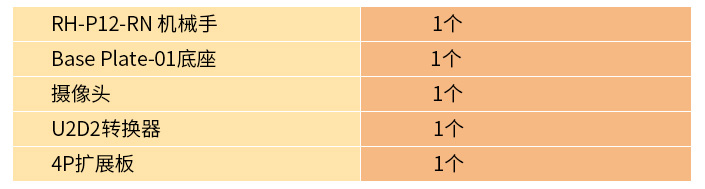
包裝組件
*注意:不含控制器或電腦(nǎo),此手臂适合電腦(nǎo)或工控機控制。
*請根據您的(de)使用(yòng)環境單獨購(gòu)買 。
出廠默認設置
| ID | 1 |
| 波特率 | 57600 bp |
相關産品推薦


