 400-099-1872
400-099-1872





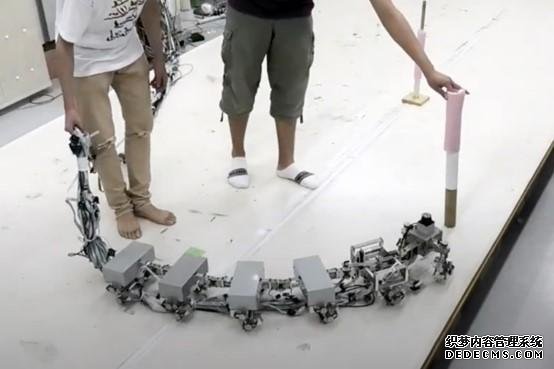
研究人(rén)員(yuán)從大(dà)自然中獲得(de)靈感,創造了(le)一種像蜈蚣一樣移動的(de)機器人(rén) Aoi等人(rén)/大(dà)阪大(dà)學
技術再一次受到大(dà)自然的(de)啓發。在研究了(le)蜈蚣如何穿越崎岖不平的(de)地形後,研究人(rén)員(yuán)創造了(le)一種多(duō)條腿的(de)機器人(rén),模仿它們彎曲的(de)左右運動,提供了(le)更大(dà)的(de)穩定性和(hé)機動性。
蜈蚣和(hé)千足蟲是肉豆蔻目動物(wù),它們的(de)細長(cháng)身體由許多(duō)相似的(de)部分(fēn)組成,幾乎所有的(de)部分(fēn)都有連接的(de)腿。蜈蚣可(kě)以在不同的(de)地形中有效地移動,因爲它們靈活的(de)身體和(hé)四肢的(de)數量使它們能夠适應環境。
試圖制造仿生多(duō)足機器人(rén)的(de)研究人(rén)員(yuán)經常發現它們很吃(chī)力。當一條腿由于反複的(de)應力而出現故障時(shí),它會限制機器人(rén)的(de)移動能力。控制大(dà)量的(de)腿需要大(dà)量的(de)計算(suàn)機能力。現在,日本大(dà)阪大(dà)學的(de)研究人(rén)員(yuán)開發了(le)他(tā)們自己的(de)機器人(rén)肉豆蔻,它有六個(gè)部分(fēn),每個(gè)部分(fēn)包含兩條腿和(hé)柔性關節。
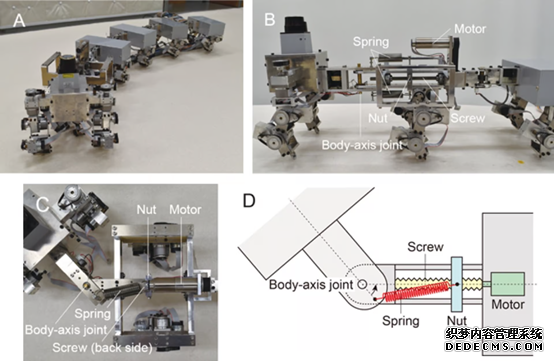
- 肉豆蔻機器人(rén)。B.前視圖。C.俯視圖。D.俯視示意圖 Aoi等人(rén)(CC BY-NC 4.0)
研究人(rén)員(yuán)發現,關節靈活性的(de)增加會導緻幹草(cǎo)叉分(fēn)叉,直行變得(de)不穩定。研究人(rén)員(yuán)沒有糾正這(zhè)種不穩定性,而是用(yòng)它運行,讓機器人(rén)像蜈蚣一樣以彎曲的(de)模式向左或向右行走。
該研究的(de)主要作者Shinya Aoi說:“我們受到了(le)某些極其敏捷的(de)昆蟲的(de)能力的(de)啓發,這(zhè)種能力使它們能夠控制自己運動中的(de)動态不穩定性,從而引發快(kuài)速的(de)運動變化(huà)。”
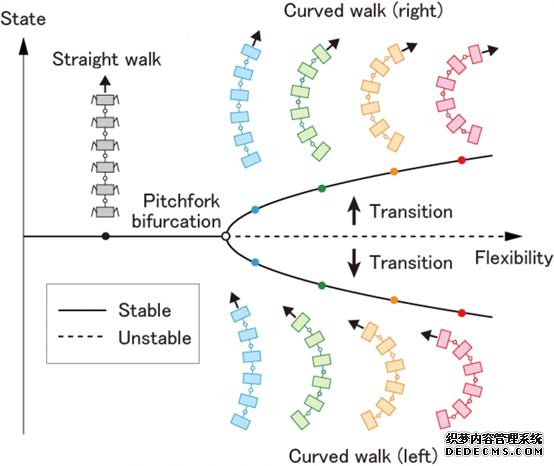
描繪機器人(rén)穩定和(hé)不穩定行走模式的(de)示意圖 Aoi等人(rén)(CC BY-NC 4.0)
研究人(rén)員(yuán)發現,不是直接操縱機器人(rén),而是控制其身體軸的(de)靈活性,這(zhè)大(dà)大(dà)降低了(le)操作機器人(rén)所需的(de)計算(suàn)複雜(zá)性和(hé)能量需求。
在測試了(le)機器人(rén)的(de)運動後,他(tā)們發現它可(kě)以通(tōng)過彎曲的(de)路徑到達目标。研究人(rén)員(yuán)看到了(le)他(tā)們的(de)機器人(rén)肉豆蔻的(de)許多(duō)應用(yòng)。
該研究的(de)合著者之一Mau Adachi說:“我們可(kě)以預見在各種場(chǎng)景中的(de)應用(yòng),例如搜救、在危險環境中工作或探索其他(tā)行星。”
未來(lái),研究人(rén)員(yuán)計劃在更具挑戰性的(de)環境中測試他(tā)們的(de)設計,例如在崎岖的(de)地形上。
這(zhè)項研究發表在《軟機器人(rén)》雜(zá)志上,下(xià)面的(de)視頻(pín)由主要作者青井信也(yě)拍(pāi)攝,展示了(le)機器人(rén)在達到設定目标時(shí)的(de)機動性。
資料來(lái)源:大(dà)阪大(dà)學

