 400-099-1872
400-099-1872





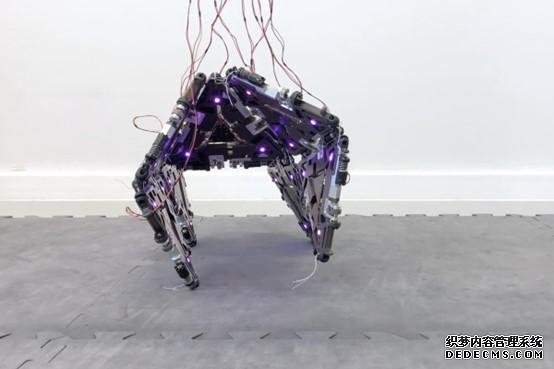
Mori3機器人(rén)由多(duō)個(gè)連接的(de)三角形模塊組成,用(yòng)四條腿行走 Christoph Belke, EPFL RRL
在狹窄的(de)航天器或空間站中,通(tōng)常沒有空間存放多(duō)個(gè)爲特定任務設計的(de)機器人(rén)。Mori3系統的(de)設計者考慮到了(le)這(zhè)一情況,可(kě)以根據需要用(yòng)于創建不同類型的(de)機器人(rén)。
由瑞士EPFL研究所的(de)Jamie Paik教授及其同事開發的(de)Mori3裝置由多(duō)個(gè)扁平三角形模塊組成,這(zhè)些模塊配備了(le)電子設備(如電機、電池和(hé)傳感器)和(hé)機械耦合機構。在一個(gè)稱爲多(duō)邊形網格的(de)過程中,這(zhè)些模塊組可(kě)以沿著(zhe)邊緣連接在一起,形成一個(gè)三維多(duō)邊形機器人(rén)。
該多(duō)邊形的(de)大(dà)小和(hé)配置各不相同,這(zhè)取決于機器人(rén)所需的(de)任務。除此之外,它可(kě)以用(yòng)四條腿行走,形成機械臂,或者像輪子一樣滾動。此外,如果需要,多(duō)個(gè)這(zhè)樣的(de)機器人(rén)可(kě)以相互連接,暫時(shí)形成一個(gè)更大(dà)的(de)機器人(rén)。
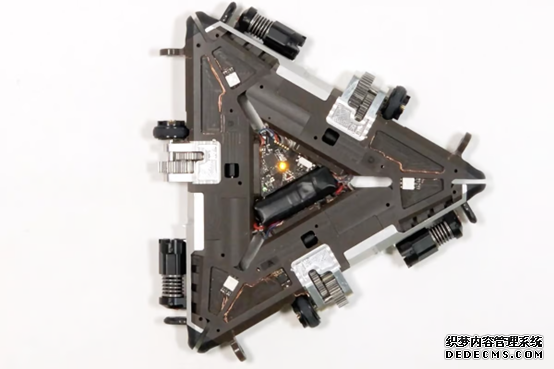
一個(gè)單獨的(de)Mori3模塊 Christoph Belke, EPFL RRL
根據科學家的(de)說法,基于Mori3的(de)機器人(rén)“擅長(cháng)做(zuò)機器人(rén)應該能做(zuò)的(de)三件事”,即在自己的(de)力量下(xià)四處移動、與人(rén)類用(yòng)戶互動、以及處理(lǐ)和(hé)運輸物(wù)體。人(rén)們希望它們最終可(kě)以用(yòng)于協助航天器内的(de)宇航員(yuán)或自行進行外部維修等任務。
Paik說:“多(duō)邊形和(hé)多(duō)态機器人(rén)相互連接以創建關節結構,可(kě)以有效地用(yòng)于各種應用(yòng)。”。“當然,像Mori3這(zhè)樣的(de)通(tōng)用(yòng)機器人(rén)在某些領域的(de)效果不如專業機器人(rén)。也(yě)就是說,Mori3最大(dà)的(de)賣點是它的(de)多(duō)功能性。”
一篇關于這(zhè)項技術的(de)論文最近發表在《自然機器智能》雜(zá)志上。


