 400-099-1872
400-099-1872





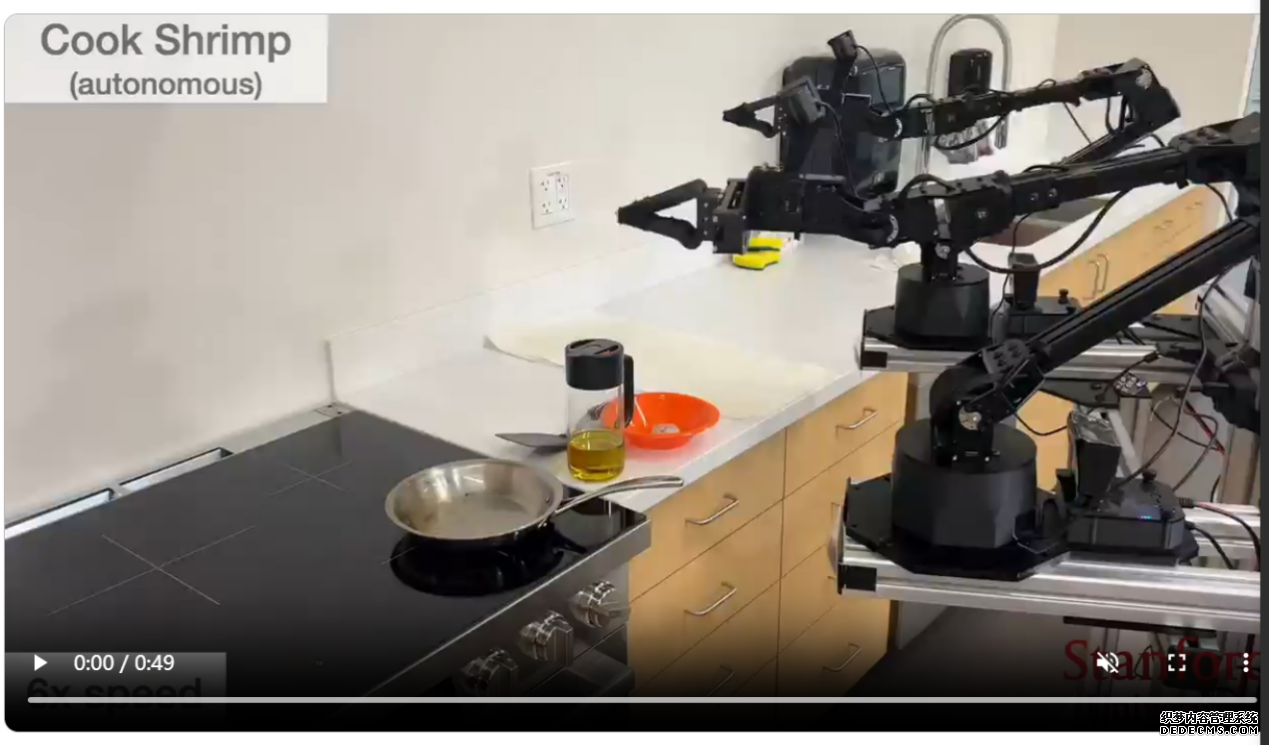
斯坦福Mobile ALOHA機器人(rén)(智能佳同款供貨)爆火!會烹饪、洗衣等多(duō)項家務功能
最近,斯坦福大(dà)學Mobile ALOHA機器人(rén)炒菜的(de)視頻(pín)和(hé)文章(zhāng)火出了(le)圈!雖然機器人(rén)技術日新月(yuè)異,能做(zuò)菜早已是意料之中的(de)事情,但把這(zhè)麽多(duō)技術集成到一起,用(yòng)廉價的(de)機械臂做(zuò)出了(le)絲滑的(de)動作,還(hái)能夠洗衣做(zuò)飯,擺放桌椅闆凳,效果真的(de)是太驚豔了(le)!
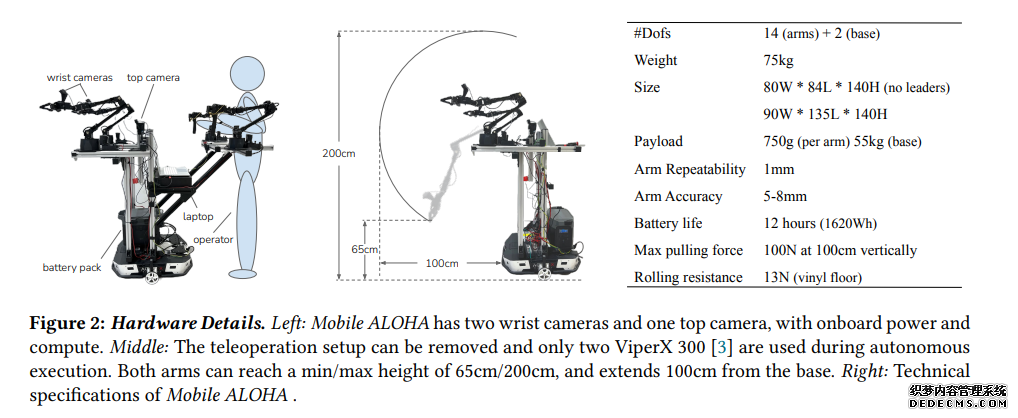
Mobile ALOHA機器人(rén)主要有兩組主控開源機械手臂和(hé)兩組随從開源手臂以及一套自主移動開發平台構成,每組手臂都有六個(gè)自由關節和(hé)二指滑動夾爪。開發人(rén)員(yuán)通(tōng)過手眼協調雙手靈活控制兩組主控手臂,來(lái)訓練和(hé)糾正随從機械臂的(de)自主學習(xí)和(hé)進化(huà)協同精度,通(tōng)過這(zhè)種端到端訓練模型,可(kě)實現機械手臂精細化(huà)控制,爲雙臂協作機械手臂低成本大(dà)規模高(gāo)質量協同運用(yòng)提供巨大(dà)的(de)價值。
賽途(北京)智能科技有限公司作爲TROSSEN公司中國區(qū)代理(lǐ)商,不僅提供原裝開發平台,還(hái)爲部分(fēn)軟硬件做(zuò)了(le)優化(huà)處理(lǐ),使得(de)結構件更加穩定結實,具體請咨詢www.bjrobot.com。
話(huà)不多(duō)說先放一個(gè)圖片
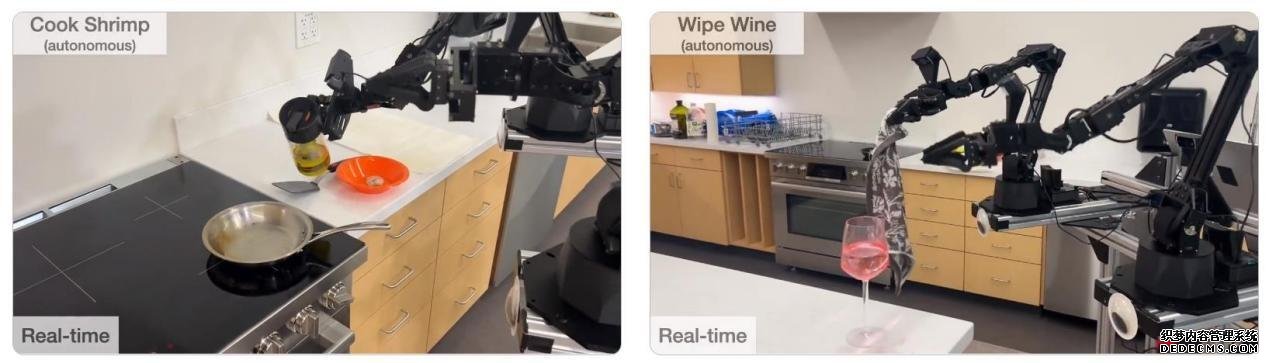
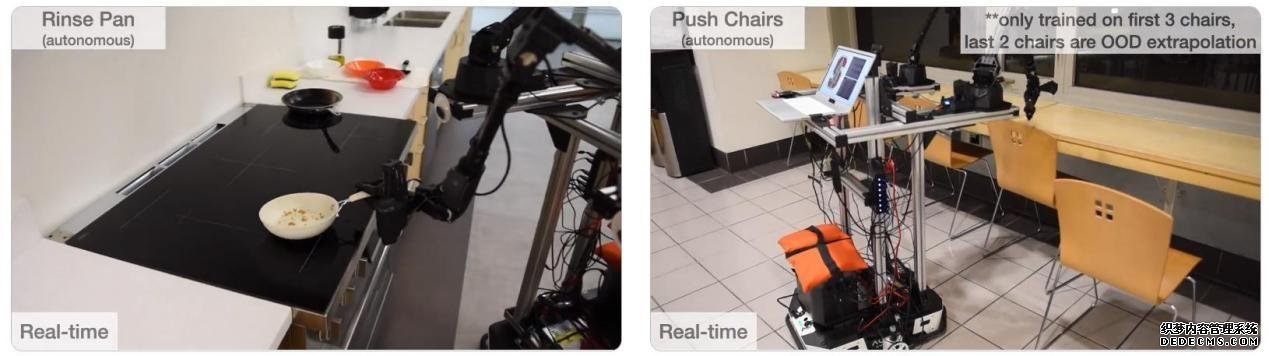
從人(rén)類示範的(de)模仿學習(xí)在機器人(rén)技術中表現出了(le)令人(rén)印象深刻的(de)性能。然而,大(dà)多(duō)數結果集中在桌面操作,缺乏一般有用(yòng)的(de)任務所必需的(de)流動性和(hé)靈巧性。在這(zhè)項工作中,斯坦福華人(rén)團隊開發了(le)一個(gè)系統,模仿移動操作任務是雙手的(de),需要全身控制。首先提出了(le)移動ALOHA,一個(gè)低成本和(hé)全身遙操作系統的(de)數據收集。它增強了(le)ALOHA系統的(de)移動基地,和(hé)一個(gè)全身遙操作接口。然後,進行監督行爲克隆,并發現與現有的(de)靜态ALOHA數據集的(de)聯合訓練提高(gāo)了(le)移動操作任務的(de)性能。每個(gè)任務有50個(gè)演示,協同訓練可(kě)以将成功率提高(gāo)高(gāo)達90%,使移動ALOHA能夠自主完成複雜(zá)的(de)移動操作任務,如炒菜和(hé)上菜,打開櫥櫃來(lái)存放沉重的(de)烹饪鍋,用(yòng)廚房(fáng)的(de)水(shuǐ)龍頭輕輕沖洗用(yòng)過的(de)鍋。
自主技能(圖片展示):


Mobile ALOHA機器人(rén)特點:
- 是一款開源、靈巧、性價比高(gāo)的(de)遠(yuǎn)程操作平台;
- 軟硬件雙開源,提供相應的(de)開發案例和(hé)3D加工件;
- 提供大(dà)量相關的(de)數據接口,可(kě)以在平台基礎上訓練和(hé)開發更多(duō)更優的(de)應用(yòng);
- 具備商用(yòng)化(huà)的(de)可(kě)實施性;
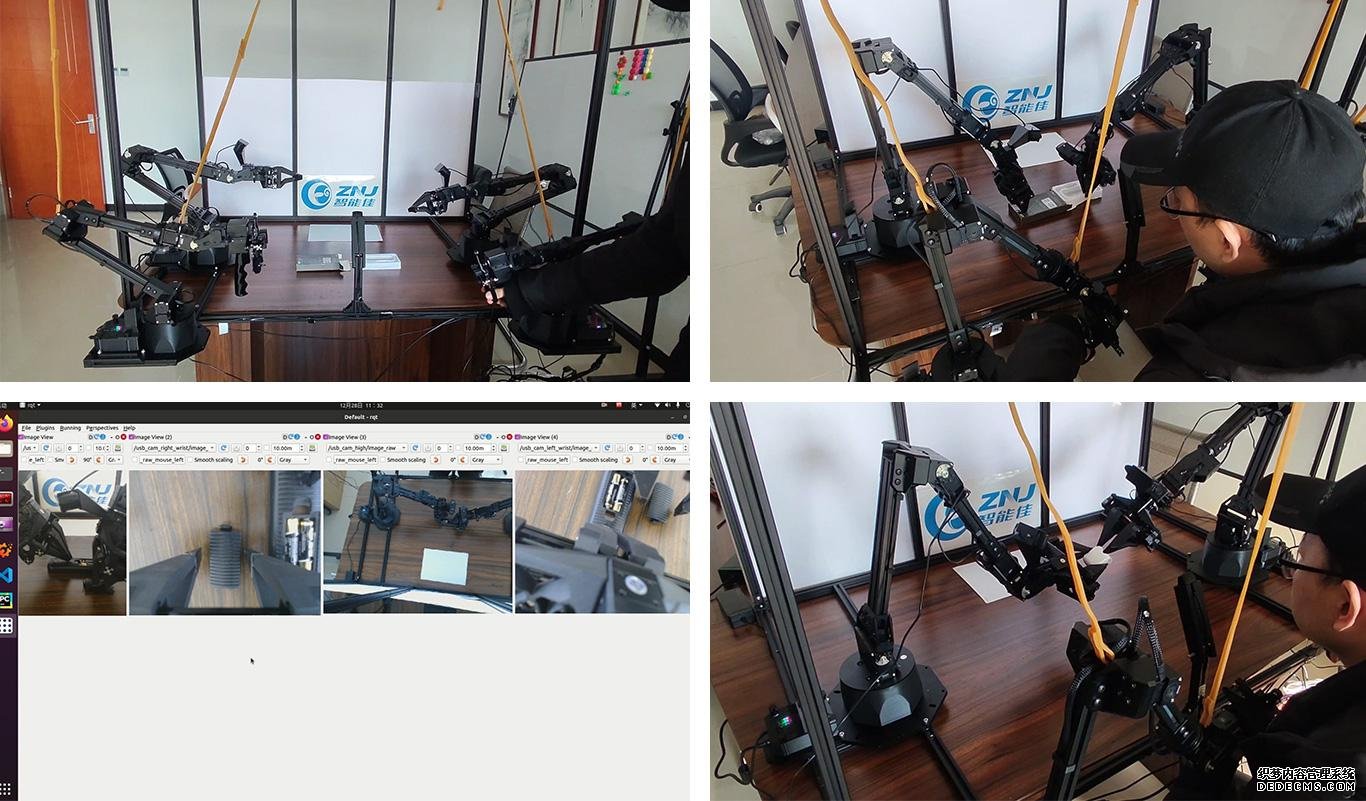
賽途(北京)智能科技有限公司是一家以教育機器人(rén)和(hé)服務機器人(rén)爲主的(de)國内最早專業從事機器人(rén)研發與銷售的(de)公司。公司通(tōng)過十餘年的(de)發展,擁有自己一支經驗豐富的(de)研發隊伍,下(xià)面圖片中可(kě)以看到我們的(de)技術人(rén)員(yuán)對(duì)ALOHA研究!
智能佳-遠(yuǎn)程協同操作手臂:
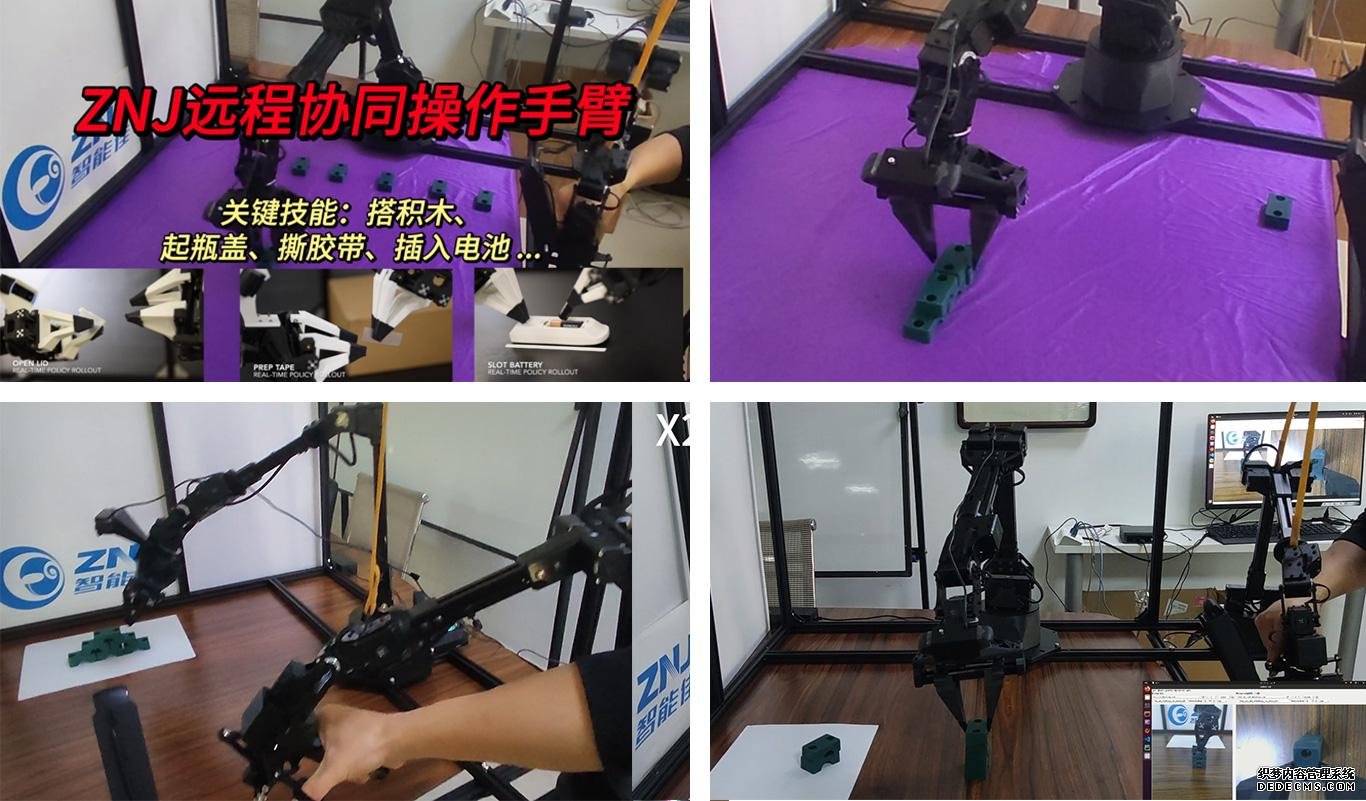
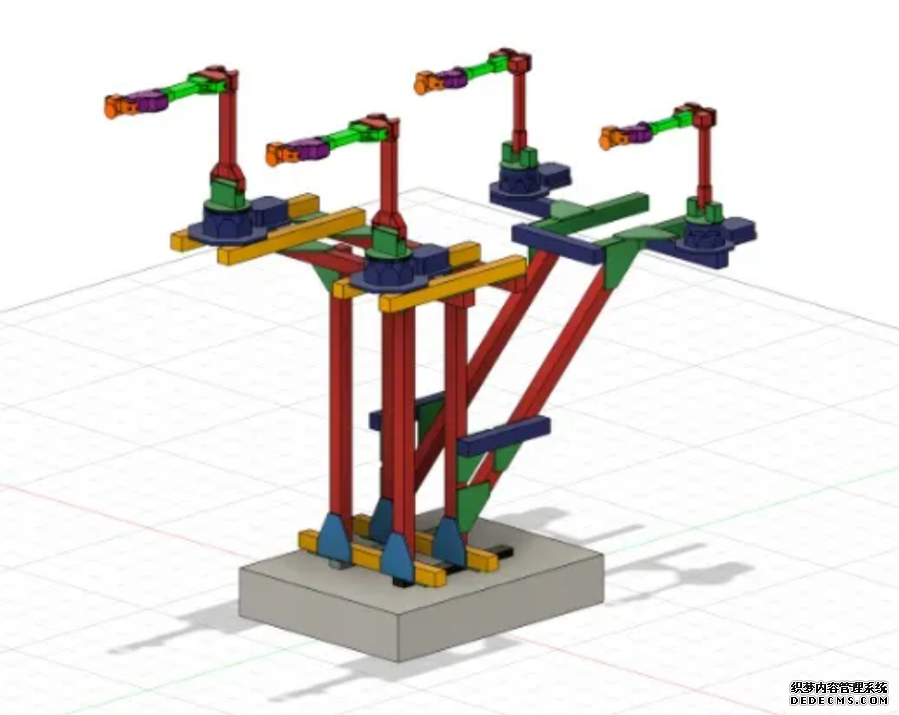
智能佳-自主進化(huà)雙臂協作開源平台
硬件方面:
硬件BOM表可(kě)以看出這(zhè)套系統主要有TROSSEN的(de)六自由度輕量級桌面機械臂+ZNJ夾持器+定制化(huà)移動底座,其中,兩個(gè)機械臂用(yòng)于遙操作示教,另外兩個(gè)機械臂用(yòng)于執行。
ViperX 300 機械手臂
ViperX 300 6DOF機械手臂是Interbotix一個(gè)新的(de)手臂系列,其特點是配有X系列舵機智能伺服舵機。與以前的(de)DYNAMIXEL伺服舵機相比,X系列舵機以小巧的(de)外形提供了(le)更高(gāo)的(de)扭矩,更有效的(de)散熱(rè)和(hé)更好的(de)耐用(yòng)性。
ViperX 300 6DOF機械手臂中的(de)DYNAMIXEL XM540-W270和(hé)DYNAMIXEL XM430-W350 伺服系統提供了(le)4096高(gāo)分(fēn)辨率和(hé)用(yòng)戶可(kě)定義的(de)PID參數。用(yòng)戶也(yě)可(kě)以訪問溫度監控,位置反饋以及電壓水(shuǐ)平,負載和(hé)一緻性設置。
ViperX 300 6DOF的(de)核心是Robotis DYNAMIXEL U2D2,可(kě)輕松訪問DYNAMIXEL向導軟件和(hé)ROS。ViperX 300提供6個(gè)自由度和(hé)360度完整旋轉。

| 自由程度 | 6 |
| 臂展 | 750 mm |
| 總跨度 | 1500 mm |
| 重複精度 | 1 mm |
| 手臂淨重 | 4 kg |
| 工作負荷 | 750 g |
| 總伺服 | 9 |
| 腕旋轉 | 是 |
ViperX 300 6DOF 通(tōng)過全面測試和(hé)組裝,由極其堅固的(de)20mm x 40mm擠壓鋁鋁支架制成。該臂位于工業級軸承上,以增加穩定性。電子設備上覆蓋有透明(míng)的(de)丙烯酸護罩,以防止電子設備受到碎屑以及機械臂本身的(de)沖擊。
采購(gòu)鏈接:https://item.jd.com/10026607657432.html
WidowX 250機械臂6DOF
WidowX250機器人(rén)手臂屬于Interbotix的(de)一個(gè)新系列,具有DYNAMIXEL X系列智能伺服電機。與以前的(de)DYNAMIXEL伺服系統相比,X系列執行器具有更高(gāo)的(de)扭矩、更高(gāo)效的(de)散熱(rè)和(hé)更好的(de)耐用(yòng)性。DYNAMIXEL XM-430-W350T和(hé)DYNAMIXEL XL430-W250-T伺服系統提供4096個(gè)位置的(de)高(gāo)分(fēn)辨率和(hé)用(yòng)戶可(kě)定義的(de)PID參數。溫度監測,位置反饋,以及電壓水(shuǐ)平,負荷和(hé)符合性設置,也(yě)是用(yòng)戶可(kě)訪問的(de)。
WidowX 250的(de)核心是Robotis DYNAMIXEL U2D2,它可(kě)以方便地訪問DYNAMIXEL向導軟件和(hé)ROS。WidowX 250提供6自由度和(hé)360度全方位旋轉。
手腕旋轉升級後選用(yòng)XM430-W350T取代伺服夾持器後面的(de)XL430-W250T伺服增加了(le)旋轉強度和(hé)精度。

| 自由程度 | 6 |
| 臂展 | 650 mm |
| 總跨度 | 1300 mm |
| 重複精度 | 1 mm |
| 手臂淨重 | 2.8 kg |
| 工作負荷 | 250 g |
| 總伺服 | 9 |
| 腕旋轉 | 是 |
WidowX 250通(tōng)過了(le)完全組裝和(hé)測試,由非常剛性的(de)20mmx20mm擠壓鋁和(hé)耐熱(rè)高(gāo)強度ABS 3D打印材料構成。該機械臂屬于工業級的(de),其利用(yòng)回轉軸承以增加穩定性和(hé)準确性。電子器件上覆蓋著(zhe)一層透明(míng)的(de)丙烯酸保護層,以防止電子産品受到碎片和(hé)機械臂本身的(de)沖擊。
采購(gòu)鏈接:https://item.jd.com/10026505977283.html
控制方面:
機械臂+移動底盤+遙操作系統全部基于ROS,根據作者的(de)描述環境爲:Ubuntu 20.04 + ROS 1 noetic
遙操作代碼和(hé)示教學習(xí)代碼全覆蓋。
智能佳機器人(rén)
400 099 1872
更多(duō)視頻(pín)信息:請關注微信公衆号



