 400-099-1872
400-099-1872





視頻(pín)鏈接:https://www.bilibili.com/video/BV1Lf421Q7yR/?spm_id_from=333.999.0.0
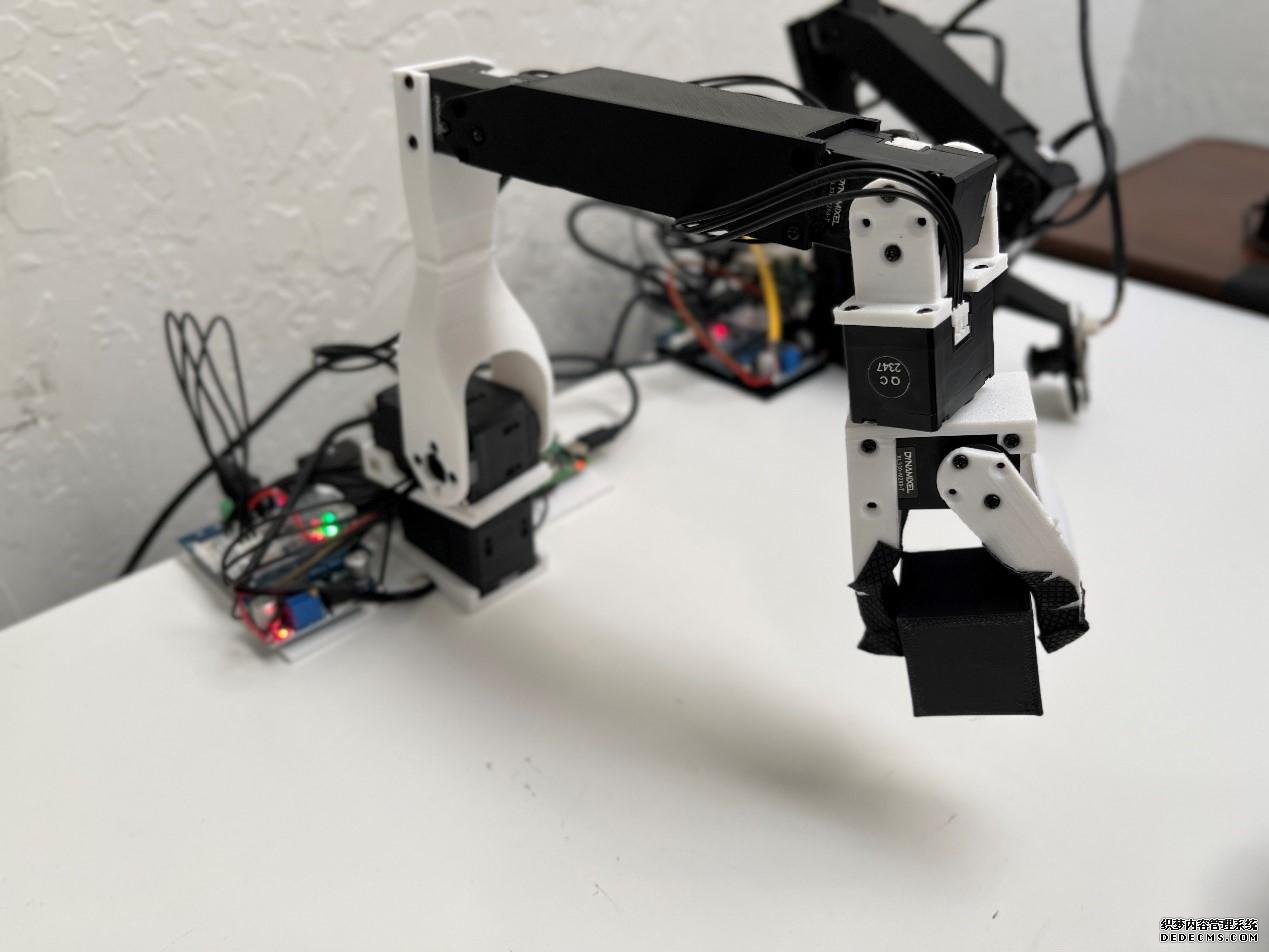
該存儲庫包含用(yòng)于構建和(hé)低成本機械臂的(de)文件。你也(yě)可(kě)以建造第二個(gè)機械臂(引導臂)來(lái)控制另一個(gè)臂(跟随臂)。領導者的(de)設計靈感來(lái)自GELLO項目,但建造起來(lái)更簡單。這(zhè)樣的(de)機械臂非常适合機器人(rén)學習(xí),其中兩隻機械手臂也(yě)能折疊衣服。
這(zhè)款機械臂使用(yòng)的(de)是Dynamixel XL430和(hé)Dynamixel XL330伺服電機。XL430電機的(de)強度幾乎是XL330電機的(de)兩倍,用(yòng)于前兩個(gè)關節。XL330電機的(de)強度較弱,但每個(gè)電機僅重18克。這(zhè)使機械臂非常輕盈快(kuài)速。Dynamixel搭配U2D2适配器,用(yòng)于将伺服電機連接到計算(suàn)機。
由于所有電機都使用(yòng)5V電壓,因此引導臂的(de)組裝更簡單。夾具由一個(gè)手柄和(hé)一個(gè)觸發器代替。在使用(yòng)過程中,可(kě)以向觸發器施加一個(gè)小扭矩,使其在默認情況下(xià)打開。GELLO的(de)設計使用(yòng)了(le)彈簧,但組裝起來(lái)要困難得(de)多(duō)。teleoperation.py腳本來(lái)測試引導臂。但可(kě)能需要調整設備名稱。
從動臂所需材料
| 名稱 | 成本價格 | 購(gòu)買鏈接 | 規格 |
| 2*Dynamixel XL430-W250 | ¥499/個(gè) | https://item.jd.com/24224400823.html | https://emanual.robotis.com/docs/en/dxl/x/xl430-w250/ |
| 4*Dynamixel XL330-M288 | ¥259/個(gè) | https://item.jd.com/10026901343226.html | https://emanual.robotis.com/docs/en/dxl/x/xl330-m288/ |
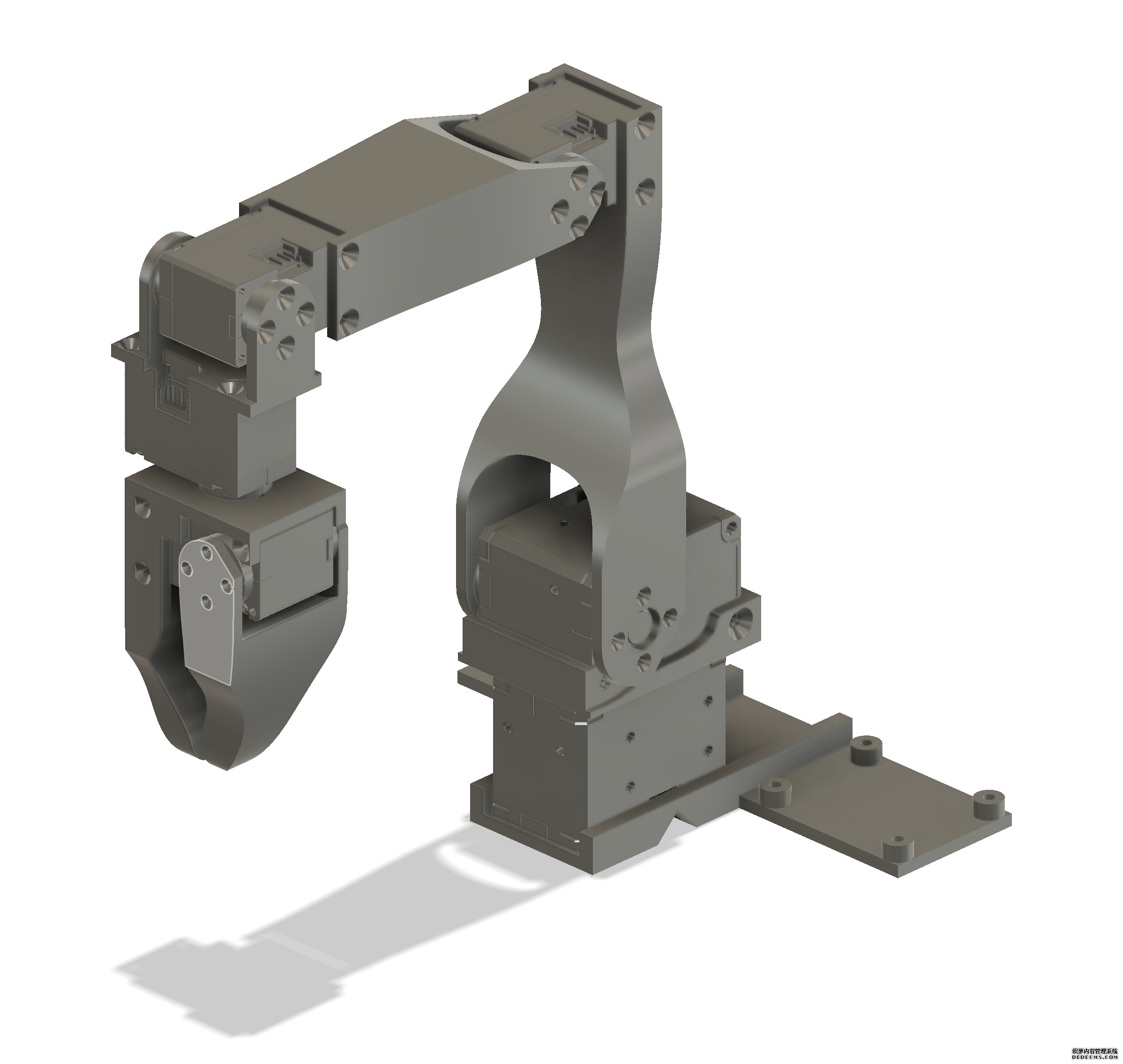
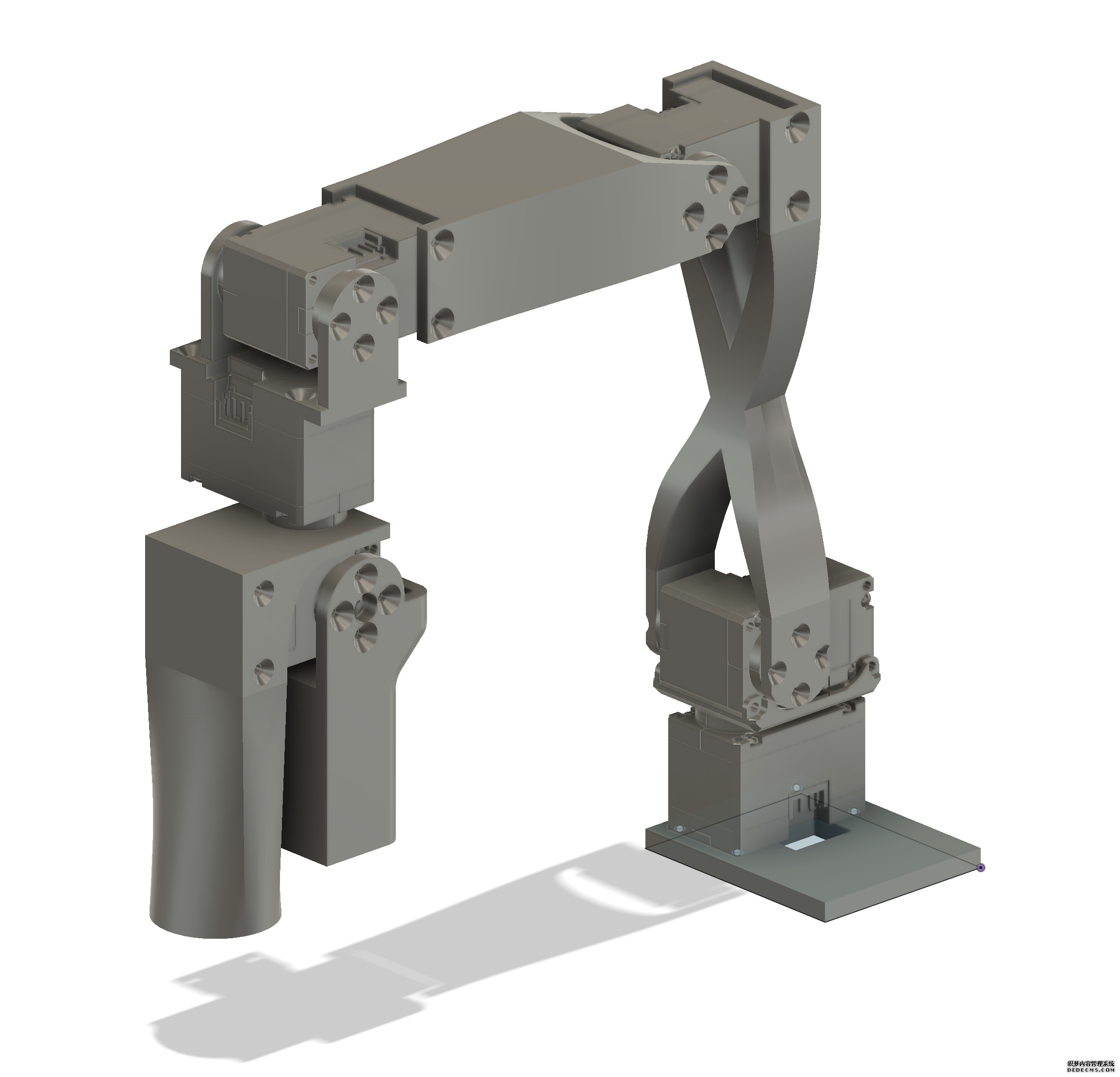
| XL330 副舵盤 | ¥100 | https://item.jd.com/10032120927327.html | 注:一包四個(gè);上圖中較長(cháng)版本需要三個(gè)(肘部到手腕延伸),組裝視頻(pín)中顯示的(de)較短版本需要兩個(gè) |
| XL430副舵盤 | ¥75 | https://item.jd.com/36822095400.html | |
| 5V啓動套件(包含U2D2 和(hé)U2D2 PHB Set 和(hé)5V電源) | ¥750 | https://item.jd.com/10100918233080.html | |
| 12V電源 | ¥180 | https://item.jd.com/10913296890.html | |
| 桌子夾具 | 根據需要自己3D打印 | ||
| 電線 | ¥10 | https://item.jd.com/10021472385989.html |
裝配
1. 使用(yòng)3D打印機打印所有零件
- STL文件采用(yòng)硬件/跟随器/STL
- 零件的(de)設計便于打印;隻有夾具的(de)移動部分(fēn)需要支撐
2. 掃描電機
- 将驅動闆連接到計算(suàn)機(應與Linux和(hé)MacOS配合使用(yòng))
- 計算(suàn)設備名稱(例如,适用(yòng)于MacOS的(de)tty.usbmodem57380045631):ls/dev/tty*
-
使用(yòng)Dynamixel向導單獨掃描每個(gè)電機
- 将所有電機的(de)波特率設置爲1M
- 将肩部的(de)伺服ID設置爲1,将夾持器伺服的(de)伺服ID設爲5(如果使用(yòng)肘部到手腕的(de)延伸,則爲6)
3. 裝配
- 組裝無底座的(de)臂
- 确保伺服裝置固定在與CAD中相同的(de)位置
- 擰入時(shí),伺服喇叭應處于默認位置
- 将導線焊接到降壓器上;輸入應連接到陰連接器,輸出應連接到陽連接器
- 将降壓器和(hé)伺服驅動器闆擰到底座上
- 将底座擰到臂上
- 将驅動器闆上的(de)D、v和(hé)G端口連接到肩部旋轉伺服
- 将肩部旋轉伺服裝置連接到肩部提升伺服裝置
- 将降壓器的(de)輸入連接到驅動器闆上的(de)V和(hé)G端口
- 将降壓器的(de)輸出和(hé)驅動器闆的(de)剩餘D端口連接到彎管伺服
- 将驅動器闆連接到電源
- 連接到XL330伺服,在Dynamixel Wizard上查看輸入電壓,然後調整降壓器上的(de)螺釘,直到輸入電壓爲5V
引導臂所需材料
| 名稱 | 成本價格 | 購(gòu)買鏈接 | 規格 |
| 6*Dynamixel XL330-M077 | ¥259/個(gè) | https://item.jd.com/10026901081680.html | https://emanual.robotis.com/docs/en/dxl/x/xl430-w250/ |
| XL330框架 | ¥95 | https://item.jd.com/10032122634140.html | |
| XL330副舵盤 | ¥100 | https://item.jd.com/10032120927327.html | 注:一包四個(gè);三個(gè)需要較長(cháng)的(de)版本(肘部到手腕延伸),兩個(gè)需要較短的(de)版本,如下(xià)圖所示 |
| 5V啓動套件(包含U2D2 和(hé)U2D2 PHB Set 和(hé)5V電源) | ¥750 | https://item.jd.com/10100918233080.html | |
| 桌子夾具 | 根據需要自己3D打印 |
由于所有電機都使用(yòng)5V電壓,因此引導臂的(de)組裝更簡單。夾具由一個(gè)手柄和(hé)一個(gè)觸發器代替。在使用(yòng)過程中,可(kě)以向觸發器施加一個(gè)小扭矩,使其在默認情況下(xià)打開。GELLO的(de)設計使用(yòng)了(le)彈簧,但組裝起來(lái)要困難得(de)多(duō)。teleoperation.py腳本來(lái)測試引導臂。但可(kě)能需要調整設備名稱。
模拟
MuJoCo中的(de)基本模拟環境可(kě)通(tōng)過simulation.py.運行
如果您對(duì)此産品感興趣,請聯系我們!
智能佳機器人(rén)
400 099 1872
www.bjrobot.com

