 400-099-1872
400-099-1872





遠(yuǎn)程操作系統
我們介紹了(le)ALOHA:一種用(yòng)于雙手遠(yuǎn)程操作的(de)低成本開源硬件系統。它能夠遠(yuǎn)程操作精确的(de)任務,如穿拉鏈,動态任務,如玩乒乓球,以及豐富的(de)接觸任務,如在NIST闆2中組裝鏈條。
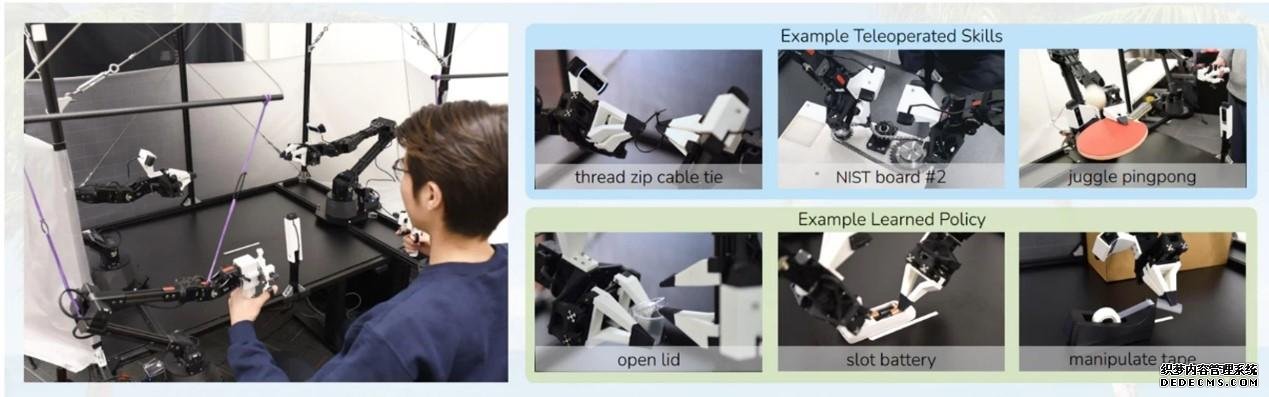
圖1:ALOHA:用(yòng)于雙手動遠(yuǎn)程操作的(de)低成本筆源硬件系統。包括貨架機器人(rén)和(hé)3D打印組件Lef:用(yòng)戶通(tōng)過回溯引導機器人(rén)進行遠(yuǎn)程操作。跟随者旋轉反光(guāng)鏡的(de)動作右:ALOHA能夠精确。接觸豐富且動态的(de)任務。我們展示了(le)遠(yuǎn)程操作和(hé)學習(xí)技能的(de)例子。
學習(xí)策略
我們介紹了(le)變形金剛的(de)動作方塊(ACT)。下(xià)面的(de)視頻(pín)顯示了(le)學習(xí)策略的(de)實時(shí)推出,每個(gè)任務隻模仿了(le)50個(gè)演示。ACT預測給定RGB圖像和(hé)本體感覺的(de)目标關節位置序列。對(duì)于以下(xià)三項任務,ACT分(fēn)别獲得(de)96%、84%和(hé)64%的(de)成功率。

ViperX 6自由度手臂(從動件)
| #Dofs(公司名稱) | 6+gripper(6+夾具) |
| Reach(臂展) | 750mm |
| Span(範圍) | 1500mm |
| Repeatability(可(kě)重複性) | 1mm |
| Accuracy( 精确) | 5-8mm |
| Working Payload(工作有效載荷) | 750g |
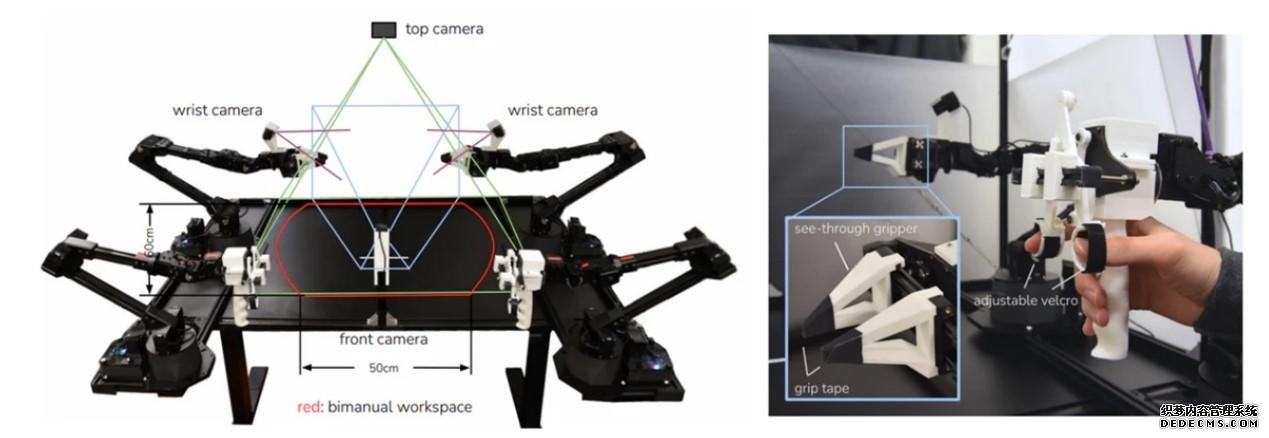
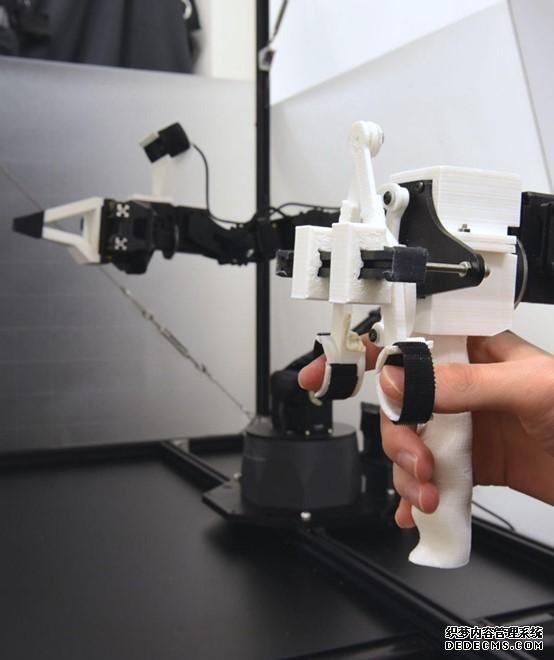
圖3:Lef:正面、頂部和(hé)兩個(gè)手腕攝像頭的(de)攝像頭視角,以及ALOHAMiddle的(de)雙手操作工作區(qū)的(de)示意圖:“手柄和(hé)剪刀(dāo)”機構和(hé)自定義夾具的(de)詳細視圖右:ViperX 6dof機器人(rén)1j的(de)技術規格。
觀察報告
我們展示了(le)評估時(shí)的(de)示例圖像觀察結果(即ACT策略的(de)輸入)。總共有4個(gè)RGB攝像機,每個(gè)攝像機的(de)分(fēn)辨率爲480x640。其中兩個(gè)攝像頭是文具,另外兩個(gè)安裝在機器人(rén)的(de)手腕上。
Slide Ziploc
幻燈片Ziploc

Slot Battery
槽式電池

Open Cup
開杯

有興趣把這(zhè)個(gè)項目帶到你們大(dà)學嗎?
填寫聯系方式或給我們打電話(huà):400 099 1872
(介紹完)
智能佳機器人(rén)
400 099 1872
www.bjrobot.com
購(gòu)買鏈接:智能佳(ZNJ) ViperX 300 6DOF自由度機械臂 Dynamixel X系列伺服舵機 ViperX 300 6DOF【圖片 價格 品牌 報價】-京東 (jd.com)
智能佳(ZNJ) WidowX 250 機械臂 6DOF自由度 更高(gāo)扭矩 智能機械手 6DOF【圖片 價格 品牌 報價】-京東 (jd.com)

