 400-099-1872
400-099-1872





軟件簡介:
ALOHA 即 A Low-cost Open-source Hardware System for Bimanual Teleoperation,是一個(gè)低成本的(de)開源雙手遙控操作硬件系統,即開源機械臂。其算(suàn)法 Action Chunking with Transformers (ACT) 采用(yòng)了(le)神經網絡模型 Transformers,因此具備模仿學習(xí)能力。隻需要 15 分(fēn)鐘(zhōng)的(de)演示,機械臂就可(kě)以學會一個(gè)動作 —— 直接從真實演示中執行端到端模仿學習(xí),并通(tōng)過自定義遠(yuǎn)程操作界面收集。
據介紹整個(gè)系統的(de)成本不高(gāo),但它比價格高(gāo)出 5-10 倍的(de)同類系統更強大(dà)。
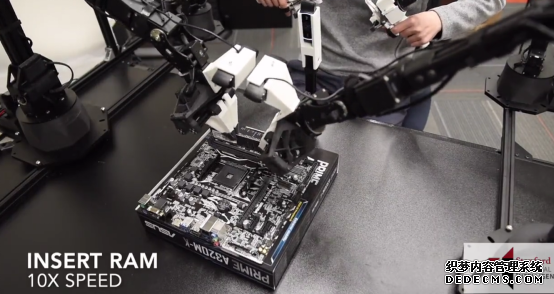
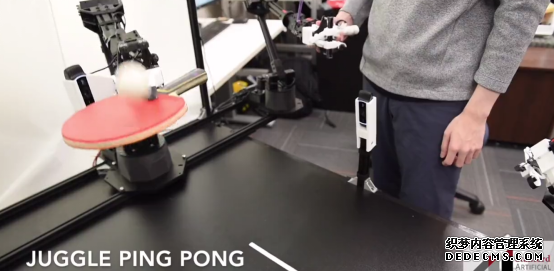
ALOHA 能夠執行精确的(de)任務,如 RAM 插入、動态任務(如乒乓球颠球),以及接觸豐富的(de)任務(如穿鞋)。并且運行可(kě)靠,在整整 8 個(gè)月(yuè)的(de)測試中沒有電機故障。

硬件部分(fēn):
ViperX 300 機械手臂

ViperX 300機械手臂屬于一個(gè)新的(de)手臂系列,其特點是配有DYNAMIXEL X系列智能伺服舵機。X系列執行器能夠提供更高(gāo)的(de)扭矩,更有效的(de)散熱(rè)和(hé)更好的(de)耐用(yòng)性,與以往的(de)伺服舵機有些微的(de)差别。XM540-W270-R和(hé)XM430-W350-R舵機伺服系統提供4096個(gè)位置的(de)高(gāo)分(fēn)辨率和(hé)用(yòng)戶可(kě)定義的(de)PID參數。溫度監控、位置反饋、電壓水(shuǐ)平、負載和(hé)合規設置也(yě)可(kě)由用(yòng)戶訪問。ViperX 300提供5個(gè)自由度和(hé)360度全方位旋轉。
ViperX 300經過完全組裝和(hé)測試,由非常堅硬的(de)20毫米x 40毫米擠壓鋁和(hé)耐熱(rè)高(gāo)強度ABS 3D印刷材料制成。臂架位于工業級回轉軸承上,增加了(le)穩定性和(hé)準确性。電子設備被一個(gè)透明(míng)的(de)亞克力屏蔽罩覆蓋,以使電子設備不受碎片以及手臂本身的(de)沖擊。
技術參數:
|
名稱 |
描述 |
|
自由度 |
6 |
|
臂展距離 |
750mm |
|
總跨度距離 |
1500mm |
|
準确度 |
1mm |
|
工作負荷 |
750g |
|
舵機數 |
8 |
|
手腕是否可(kě)旋轉 |
是 |
ViperX 300 可(kě)達範圍:
XM540舵機伺服系統支持高(gāo)達360度的(de)旋轉,這(zhè)也(yě)使得(de)機械臂的(de)運動範圍極大(dà)。
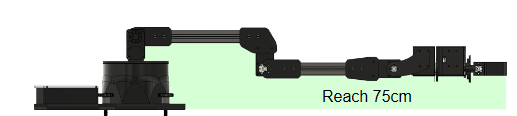
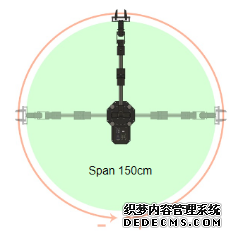
ViperX 300機械臂從底座中心到抓手的(de)水(shuǐ)平距離爲75cm,總跨距爲150cm。ViperX 300手臂的(de)工作載荷爲750g。工作載荷是指在正常工作環境下(xià),該臂不應超過的(de)重量,并通(tōng)過手臂在約一半伸展範圍内重複提升物(wù)體且不發生故障的(de)能力進行測量。雖然ViperX 300可(kě)以舉起超過750克,但我們不建議(yì)您操作超過750g的(de)有效載荷。
WidowX 250 robot arm 6 DOF:

WidowX 250 可(kě)達範圍
XM540舵機伺服系統支持高(gāo)達360度的(de)旋轉,這(zhè)也(yě)使得(de)機械臂的(de)運動範圍極大(dà)。
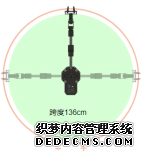
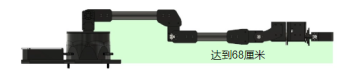
WidowX 250 6自由度機械臂水(shuǐ)平伸展距離爲68厘米(以底座中心爲起點),總跨度爲136厘米。其工作有效載荷是250g。工作有效載荷是指機械臂在正常工作環境下(xià)不應超過的(de)重量,并且通(tōng)過機械臂在伸展大(dà)約一半時(shí),其重複擡起物(wù)體而不發生故障的(de)能力來(lái)測量其有效載荷。雖然WidowX 250可(kě)以提起250g以上的(de)物(wù)體,但是我們并不推薦您這(zhè)樣做(zuò)。

