400-099-1872
400-099-1872





産業升級、 機械自動化(huà)等離不開電機的(de)廣泛使用(yòng),常見的(de)有伺服電機、步進電機、直流電機、舵機等類型。舵機是一種位置(角度)伺服的(de)驅動器,适用(yòng)于那些需要角度不斷變化(huà)并可(kě)以保持的(de)閉環控制執行模塊。小巧的(de)舵機能在空間緊湊的(de)地方發揮它的(de)作用(yòng)。

炎炎夏日,DYNAMIXEL 舵機新品發布,忠于品質,一如既往得(de)精心設計。
XC430-T150BB/T240BB-T該産品将金屬滾珠軸承應用(yòng)于XC430系列,而不是塑料套。
這(zhè)一變化(huà)提高(gāo)了(le)旋轉軸上垂直載荷的(de)耐久性。
其他(tā)規格與現有XC430系列相同。

包裝組件
| XC430-T150BB/T240BB-T | 1 |
| HN11-N101(已裝配) | 1 |
| 機器人(rén)電纜-X3P 180mm | 1 |
| 螺栓M2.6x5 TAP | 5 |
| 螺栓 M2x5 | 5 |
| 墊片 | 5 |
不包括副舵盤組(HN11-i101組)
産品規格/XC430-T150BB-T
| 項目 | 規格 |
| MCU | ARM CORTEX-M3 (72 [MHz], 32Bit) |
| 位置傳感器 | 非接觸式絕對(duì)編碼器(12Bit,360[°]) |
| 電機 | 無芯 |
| 波特率 | 9,600 [bps] ~ 4.5 [Mbps] |
| 控制算(suàn)法 | PID控制 |
| 分(fēn)辨率 | 4096 [pulse/rev] |
| 操作模式 |
速度控制模式 位置控制模式(0 ~ 360 [°]) 擴展位置控制模式(多(duō)圈) PWM控制模式(電壓控制模式) |
| 重量 | 65 [g] |
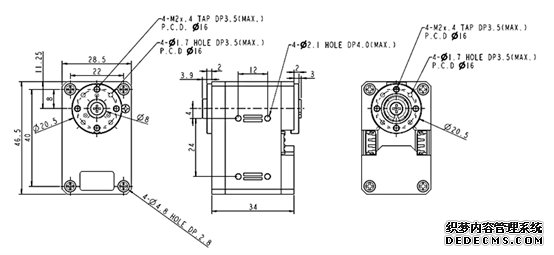
| 尺寸(寬x高(gāo)x深) | 28.5 x 46.5 x 34 [mm] |
| 傳動比 | 159.59 : 1 |
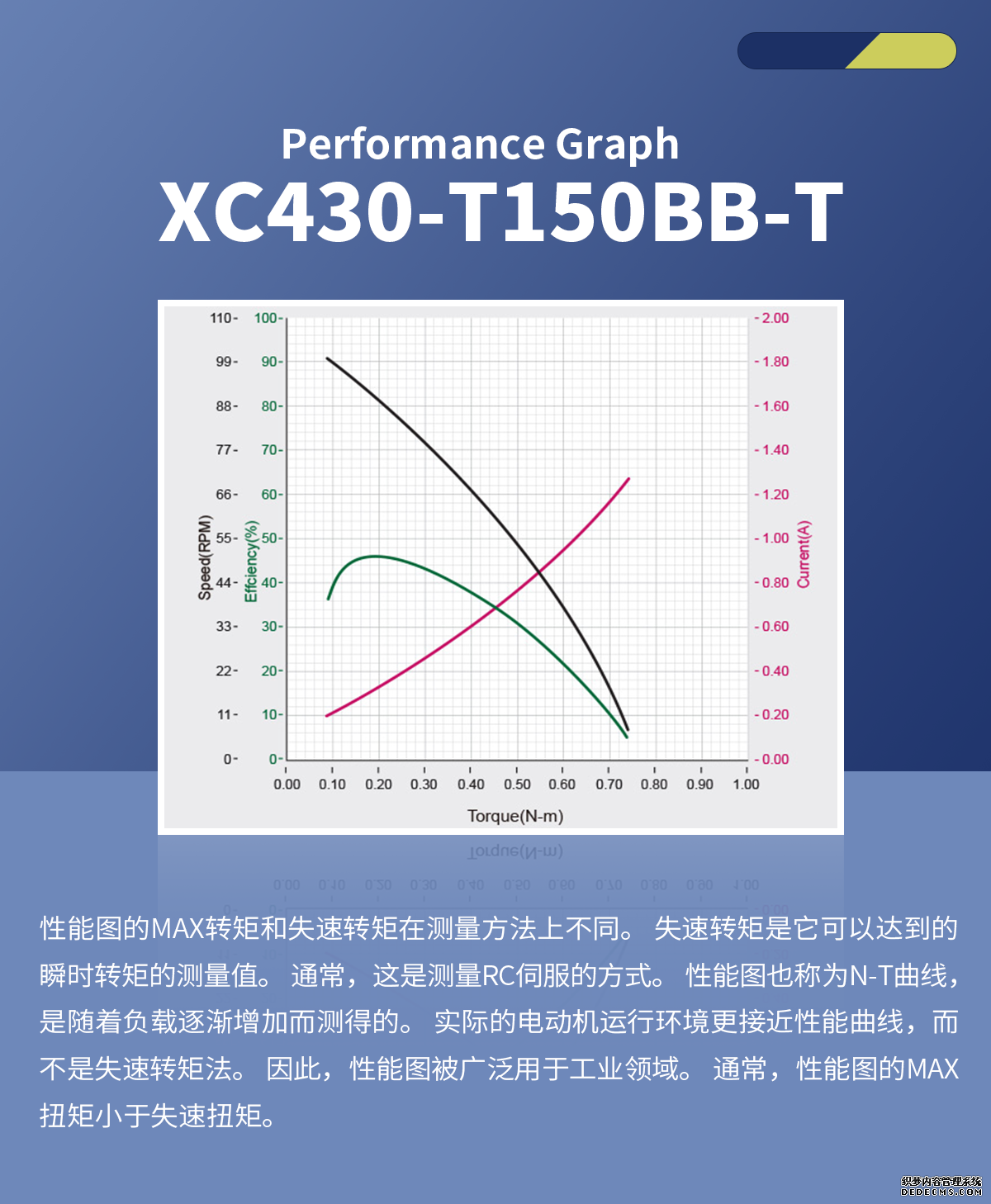
| 失速扭矩 | 1.6 [N.m] (at 12.0 [V], 1.4 [A]) |
| 空載速度 | 106 [rev/min] (at 12.0 [V]) |
| 工作溫度 | -5 ~ +80 [°C] |
| 輸入電壓 | 6.5 ~ 14.8 [V] (推薦值: 12.0 [V]) |
| 命令信号 | 數字包 |
| 物(wù)理(lǐ)連接 |
TTL級多(duō)點總線 半雙工異步串行通(tōng)信 (8bit, 1stop, No Parity) |
| ID | 253 ID (0 ~ 252) |
| 反饋 | 位置、速度、負載、實時(shí)刻度、軌迹、溫度、輸入電壓等 |
| 外殼材料 | 工程塑料(主體) |
| 齒輪材料 | 全金屬齒輪 |
| 待機電流 | 46 [mA] |
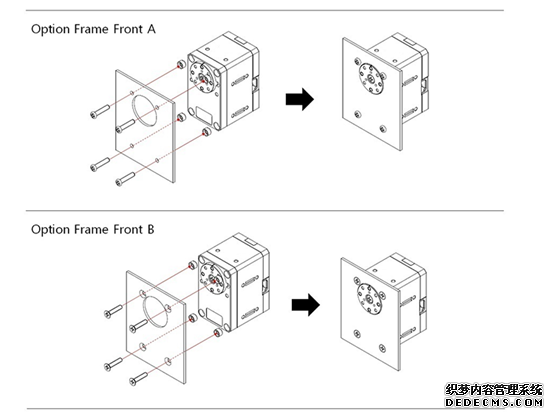
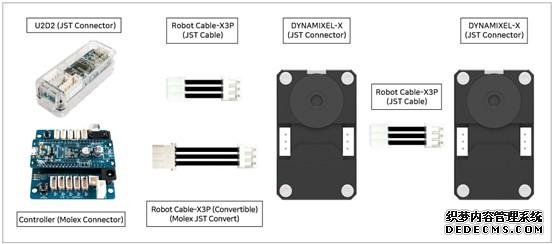
多(duō)種布線方法

圖紙
兼容産品
注意事項
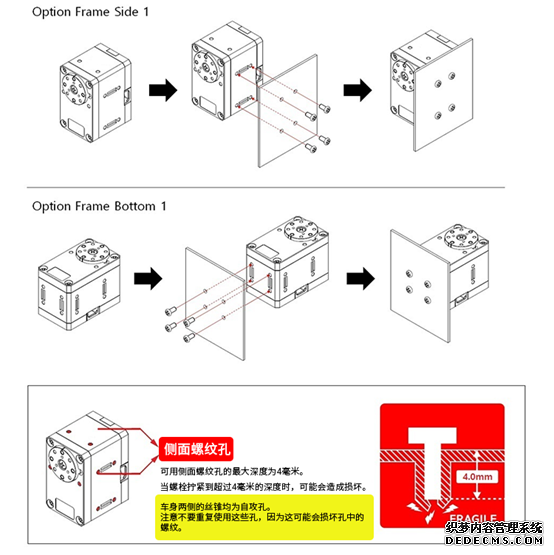
在組裝後蓋之前,整理(lǐ)纏繞的(de)連接線。
連接線理(lǐ)順再安裝舵機後蓋。纏繞在一起的(de)連接線可(kě)能會被外殼壓扁,從而導緻通(tōng)信錯誤。
如果使用(yòng)兩根電纜穿過空心外殼,電纜會損壞。
僅允許一根連接線通(tōng)過外殼孔穿出。
DYNAMIXEL-X系列采用(yòng)新型鍍金JST連接器,實現安全可(kě)靠的(de)通(tōng)信。
以前的(de)Dynamixel使用(yòng)的(de)是Molex連接器。
要通(tōng)過OpenCM或USB2Dynamixel控制DYNAMIXEL-X系列執行器,請使用(yòng)包裝中舵機轉換線。
但是,XL430型号中不包括舵機轉換線。
使用(yòng)僅支持JST連接器的(de)控制器和(hé)接口時(shí),請自行購(gòu)買舵機轉換線。
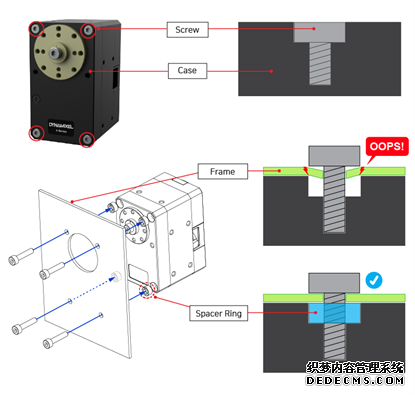
安裝示例