 400-099-1872
400-099-1872





項目頁面
LEAP Hand視頻(pín)展示:LEAP Hand 機械手-視頻(pín)_哔哩哔哩_bilibili
簡介
在機器人(rén)技術領域,靈巧操作一直是一項長(cháng)期存在的(de)挑戰。盡管機器學習(xí)技術已經展現出了(le)巨大(dà)的(de)潛力,但目前的(de)應用(yòng)大(dà)多(duō)還(hái)停留在模拟階段。這(zhè)一現象在很大(dà)程度上是由于缺乏合适的(de)硬件支持。爲了(le)解決這(zhè)一問題,本文介紹了(le)LEAP Hand——一款專爲機器學習(xí)研究設計的(de)低成本、高(gāo)度靈巧的(de)拟人(rén)手。
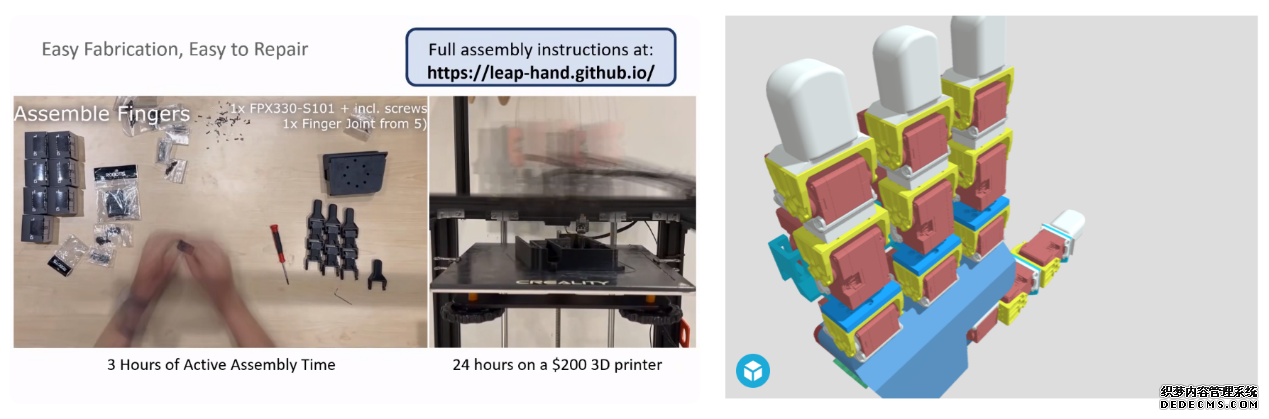
相較于以往的(de)設計,LEAP Hand采用(yòng)了(le)創新的(de)運動學結構,确保了(le)在各種手指姿勢下(xià)都能實現卓越的(de)靈活性。這(zhè)款手的(de)成本非常低廉,且可(kě)以利用(yòng)現成的(de)零件,在短短4小時(shí)内完成組裝。LEAP Hand不僅成本效益高(gāo),還(hái)能在長(cháng)時(shí)間内持續提供強大(dà)的(de)扭矩輸出。
我們在一系列實驗中證明(míng)了(le)LEAP Hand在現實世界中執行多(duō)種操作任務的(de)能力,包括視覺遠(yuǎn)程操作、被動視頻(pín)數據學習(xí)以及sim2real技術的(de)應用(yòng)。在所有這(zhè)些實驗中,LEAP Hand都明(míng)顯超越了(le)其最接近的(de)競争對(duì)手Allegro Hand,同時(shí)成本僅爲其八分(fēn)之一。
爲了(le)進一步推動機器學習(xí)研究的(de)發展,我們在官方網站http://leaphand.com上公開了(le)URDF模型、3D CAD文件、經過精心調優的(de)仿真環境、開發平台,以及一系列優化(huà)的(de)API。這(zhè)些資源将爲研究人(rén)員(yuán)和(hé)開發者提供極大(dà)的(de)便利,幫助他(tā)們更高(gāo)效地開發和(hé)測試新的(de)算(suàn)法和(hé)應用(yòng)。
資料
- Assembly Guide(https://www.leaphand.com/assembly)
- Github - LEAP Hand API(https://www.leaphand.com/assembly)
- Github - Sim2Real(GitHub - leap-hand/LEAP_Hand_Sim)
LEAP Hand(XC330舵機)所需材料
LEAP Hand(XL330舵機)所需材料
警告
此套餐中不包括第三方組件和(hé)3D打印件。您需要根據LEAP Hand項目網站上列出的(de)清單,自行購(gòu)買并打印其他(tā)所需的(de)部件。 該套餐産品爲散件形式,LEAP Hand需要您根據項目網站上提供的(de)詳細組裝指南(nán)進行組裝。
運動學和(hé)靈活性
LEAP Hand在手指伸展和(hé)收縮狀态下(xià)均能展現卓越的(de)側向靈巧性,這(zhè)歸功于其先進的(de)全方位外展-内收驅動機制。

成本
LEAP Hand的(de)造價低廉,僅需三小時(shí),利用(yòng)普通(tōng)手工工具即可(kě)輕松組裝。
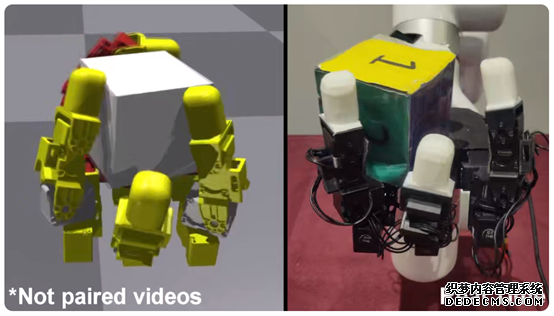
使用(yòng)Isaac Gym的(de)仿真到現實轉換流程
開源項目,歡迎訪問此處獲取(leaphand.com/sim2real)
同時(shí),敬請關注我們的(de)後續研究:靈巧功能性抓握技術(https://dexfunc.github.io/)
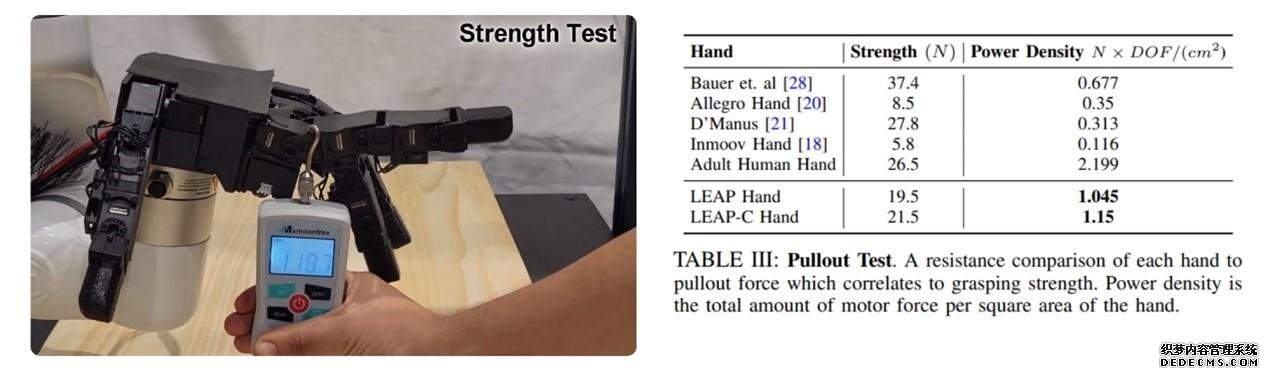
力量
"LEAP Hand" 是當今可(kě)用(yòng)的(de)最強大(dà)的(de)機械手之一。
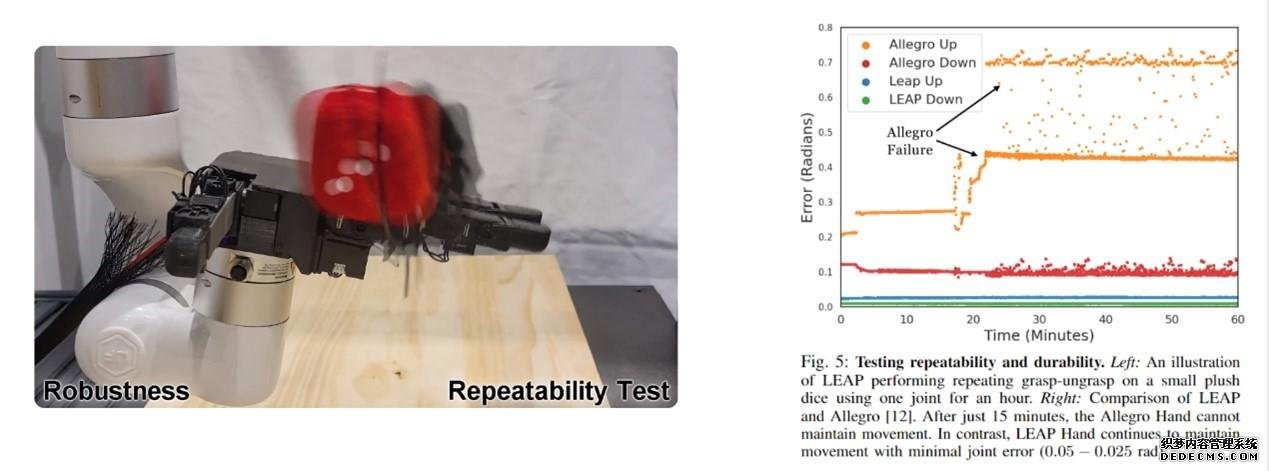
魯棒性
LEAP Hand 能夠精确地完成重複動作而不發生過熱(rè)。
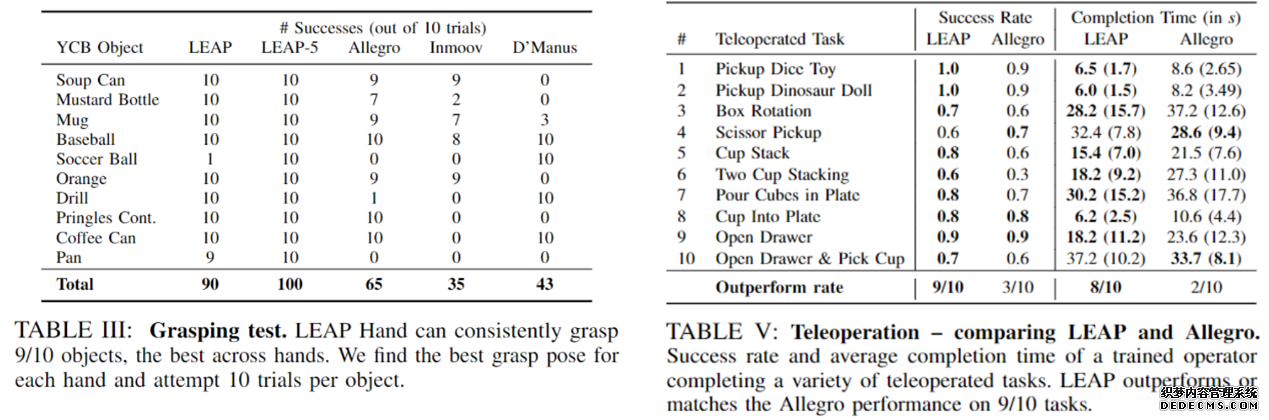
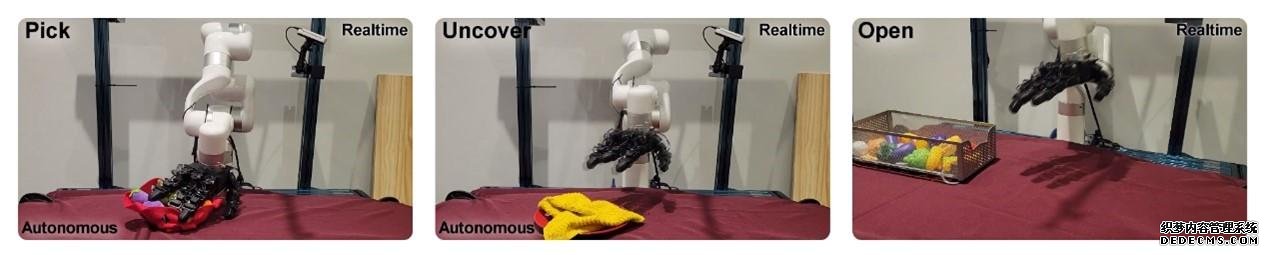
類人(rén)的(de)多(duō)功能性
LEAP Hand 能夠輕松地抓取各種不同的(de)物(wù)體。

基于未校準人(rén)類視頻(pín)的(de)遙控操作
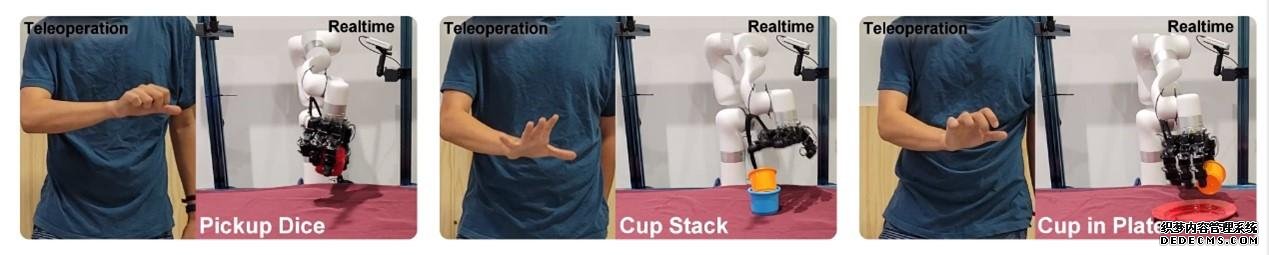
使用(yòng)互聯網視頻(pín)的(de)行爲克隆

演示
在2023年的(de)RSS大(dà)會上進行現場(chǎng)演示!

視頻(pín)展示:LEAP Hand演示-RSS大(dà)會視頻(pín)_哔哩哔哩_bilibili
BibTeX文獻
@article{shaw2023leaphand,
title={LEAP Hand: Low-Cost, Efficient, and Anthropomorphic Hand for Robot Learning},
author={Shaw, Kenneth and Agarwal, Ananye and Pathak, Deepak},
journal={Robotics: Science and Systems (RSS)},
year={2023}}
如果您對(duì)此産品感興趣,請聯系我們!
智能佳機器人(rén)
400 099 1872
www.bjrobot.com

