 400-099-1872
400-099-1872





微型機器人(rén)最常見的(de)用(yòng)途之一是在災難現場(chǎng)廢墟中尋找被困的(de)幸存者。受昆蟲啓發的(de)CLARI機器人(rén)可(kě)能特别擅長(cháng)這(zhè)樣做(zuò),因爲它可(kě)以讓自己變得(de)更瘦,以擠過狹小的(de)水(shuǐ)平間隙。
CLARI是由工程博士生Heiko Kabutz領導的(de)團隊在科羅拉多(duō)大(dà)學博爾德分(fēn)校創建的(de),其名稱是“柔順腿鉸接機器人(rén)昆蟲”的(de)首字母縮寫。他(tā)與該大(dà)學的(de)助理(lǐ)教授Kaushik Jayaram合作,後者之前創造了(le)一種受蟑螂啓發的(de)機器人(rén),可(kě)以使自己變平以擠壓垂直間隙。
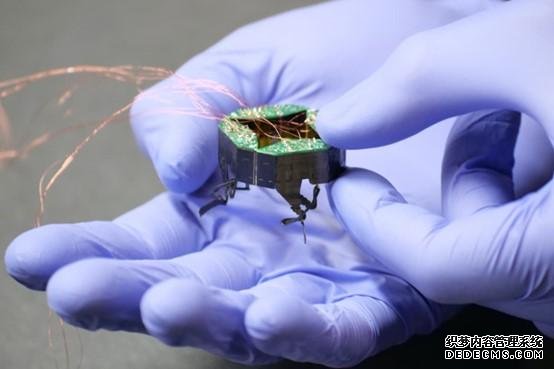
CLARI的(de)四條腿的(de)身體大(dà)約有一個(gè)壽司卷那麽大(dà),從上面看大(dà)緻呈正方形,由四個(gè)部分(fēn)組成,這(zhè)些部分(fēn)通(tōng)過機器人(rén)靈活的(de)外殼相互連接。
每個(gè)部分(fēn)包含一條腿,以及它自己的(de)電路闆和(hé)雙制動器移動腿向前和(hé)向後,從一邊到另一邊。這(zhè)意味著(zhe)每條腿都可(kě)以獨立于其他(tā)腿進行操作。
在開闊地上移動時(shí),CLARI會保持其默認的(de)方形形狀,以獲得(de)最佳的(de)速度和(hé)穩定性。然而,如果它遇到一個(gè)太窄而無法以這(zhè)種形式穿過的(de)缺口,它可(kě)以将自己重新配置成更長(cháng)、更窄的(de)形狀。就硬數字而言,方形機器人(rén)的(de)寬度約爲34毫米(1.3英寸),窄型機器人(rén)的(de)寬度僅爲21毫米(0.8英寸)。
雖然目前版本的(de)CLARI是硬連接到電源和(hé)控制源的(de),但希望它的(de)後代将由電池供電,并配備傳感器,使他(tā)們能夠自主穿越複雜(zá)的(de)環境。科學家們還(hái)想讓這(zhè)些機器人(rén)變得(de)更小,同時(shí)爲它們配備更多(duō)的(de)腿,以提高(gāo)機動性。
卡布茨說:“當我們試圖捕捉昆蟲時(shí),它們可(kě)能會消失在縫隙中。”。“但如果我們有蜘蛛或蒼蠅那樣的(de)機器人(rén),我們可(kě)以添加攝像頭或傳感器,現在我們可(kě)以開始探索以前無法進入的(de)空間。”
資料來(lái)源:科羅拉多(duō)大(dà)學博爾德分(fēn)校

