 400-099-1872
400-099-1872





行業資訊
-
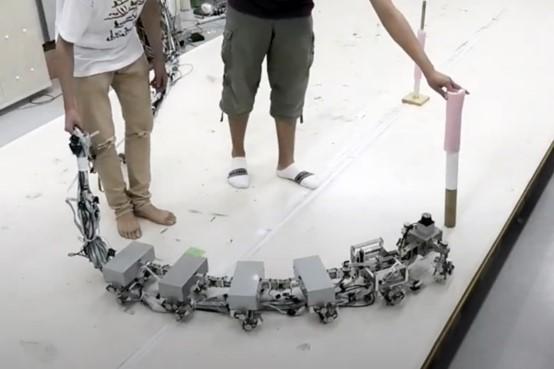
研究人(rén)員(yuán)從大(dà)自然中汲取靈感,創造出像蜈蚣一
2023-06-08研究人(rén)員(yuán)從大(dà)自然中獲得(de)靈感,創造了(le)一種像蜈蚣一樣移動的(de)機器人(rén) Aoi等人(rén)/大(dà)阪大(dà)學 技術再...
了(le)解詳情
-
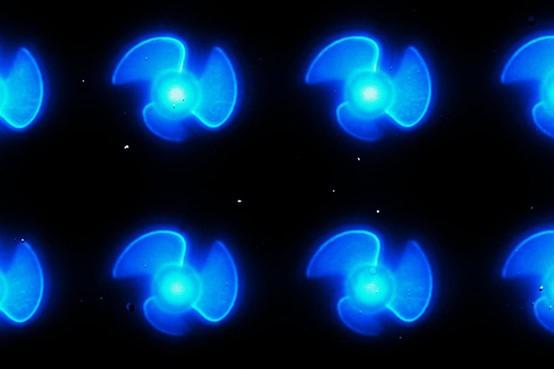
聲音(yīn)驅動的(de)微型機器人(rén)快(kuài)速移動到需要它們運送
2023-06-07研究人(rén)員(yuán)在醫療微型機器人(rén)方面又向前邁出了(le)一步,設計了(le)一種小型、快(kuài)速、自推進的(de)機器人(rén)...
了(le)解詳情

-
可(kě)更換的(de)機載手臂爲“你能幫我一把嗎?”帶來(lái)
2023-05-30Jizai Arms 超編機械臂系統每位用(yòng)戶最多(duō)可(kě)容納六隻手臂 Kazuaki Koyama / Jizai Arms 爲人(rén)們配備 額外的(de)...
了(le)解詳情

-
機器蜈蚣通(tōng)過加裝多(duō)條腿來(lái)克服障礙
2023-05-23機器人(rén)的(de)幾個(gè)版本之一它最終共有16條腿 佐治亞理(lǐ)工學院 盡管雙足和(hé)四足機器人(rén)可(kě)能擅長(cháng)穿越...
了(le)解詳情
-
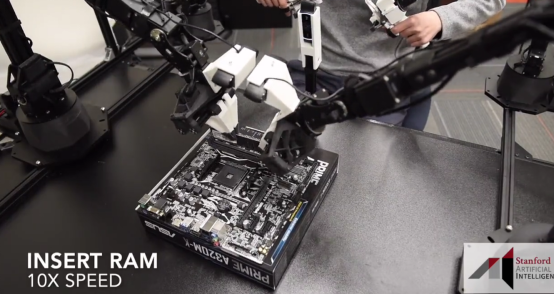
軟件簡介: ALOHA 即 A Low-cost Open-source Hardware System for Bimanual Teleoperation,是一個(gè)低成本的(de)開源雙...
了(le)解詳情
-
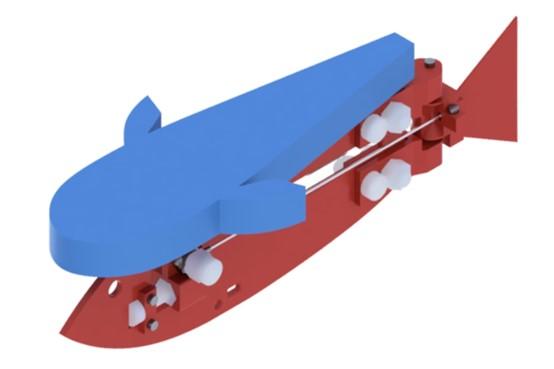
突破性的(de)機器魚有一種扭曲的(de)推進方式
2023-05-09該機器人(rén)由一個(gè)浮動部分(fēn)(藍色)和(hé)一個(gè)獨特的(de)推進系統(紅色)組成 詹龍佑 在設計 類似魚...
了(le)解詳情
-
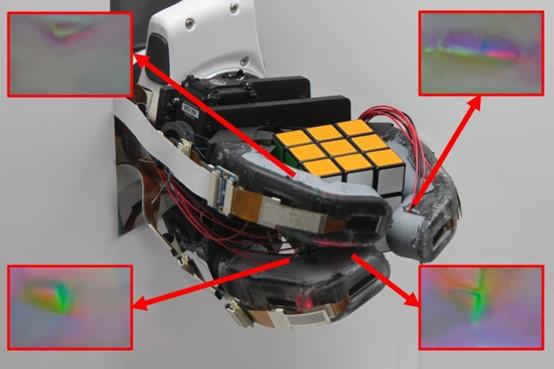
機器人(rén)手通(tōng)過感知形狀來(lái)識别自己在抓什(shén)麽
2023-04-18GelSight EndoFlex的(de)手抓住一個(gè)魔方,鑲嵌圖顯示了(le)它的(de)六個(gè)傳感器中的(de)四個(gè)是如何看到物(wù)體輪廓的(de)...
了(le)解詳情

-
微型混合機器人(rén)可(kě)以識别、捕獲單個(gè)細胞
2023-04-12研究人(rén)員(yuán)創造了(le)一種由電場(chǎng)和(hé)磁場(chǎng)驅動的(de)微型機器人(rén),可(kě)以識别和(hé)捕獲單個(gè)人(rén)體細胞 Depositph...
了(le)解詳情

