 400-099-1872
400-099-1872





多(duō)材料3D打印方法可(kě)一次性生産功能性設備
THOMAS BUCHNER/ETH ZURICH
現在,一隻帶韌帶和(hé)肌腱的(de)骨骼機械手可(kě)以一次性進行3D打印。這(zhè)一令人(rén)毛骨悚然的(de)成就是通(tōng)過一種新的(de)增材制造方法實現的(de),這(zhè)種方法可(kě)以同時(shí)以高(gāo)分(fēn)辨率打印剛性和(hé)彈性材料。
這(zhè)項新工作是瑞士蘇黎世聯邦理(lǐ)工學院的(de)研究人(rén)員(yuán)與馬薩諸塞州梅德福市麻省理(lǐ)工學院名爲Inkbit的(de)子公司合作的(de)結果。該小組設計了(le)一種新的(de)3D噴墨打印技術,能夠使用(yòng)比以前更廣泛的(de)材料。
在《自然》雜(zá)志的(de)一篇新論文中,該研究小組首次展示了(le)該技術可(kě)用(yòng)于在一次打印作業中打印由多(duō)種材料制成的(de)複雜(zá)移動設備。其中包括一個(gè)仿生機械手,一個(gè)帶有抓取器的(de)六腿機器人(rén),以及一個(gè)以心髒爲模型的(de)泵。
蘇黎世聯邦理(lǐ)工學院的(de)博士生Thomas Buchner說:“真正讓我們興奮的(de)是,這(zhè)項技術首次允許我們打印出可(kě)以在打印床上工作的(de)完整功能系統。”他(tā)是描述這(zhè)項工作的(de)論文的(de)第一作者。
這(zhè)項新技術的(de)工作原理(lǐ)與辦公室裏常見的(de)噴墨打印機類似。不過,這(zhè)台打印機噴出來(lái)的(de)不是彩色墨水(shuǐ),而是暴露在紫外線(UV)光(guāng)下(xià)會硬化(huà)的(de)樹脂,而不是僅僅打印一張紙,而是一層一層地構建3D物(wù)體。它還(hái)能夠以極高(gāo)的(de)分(fēn)辨率打印,體素(相當于3D像素)隻有幾微米寬。
3D噴墨打印機并不新鮮,但他(tā)們可(kě)以使用(yòng)的(de)材料通(tōng)常是有限的(de)。這(zhè)是因爲每一層都不可(kě)避免地有缺陷,處理(lǐ)這(zhè)個(gè)問題的(de)标準方法一直是把它們刮掉或滾平。這(zhè)意味著(zhe)軟或緩慢(màn)固化(huà)的(de)材料不能使用(yòng),因爲他(tā)們會得(de)到塗抹或壓扁。
Inkbit多(duō)年來(lái)一直緻力于解決這(zhè)個(gè)問題。該公司制造了(le)一台打印機,該打印機具有在多(duō)個(gè)噴墨單元、紫外線固化(huà)單元和(hé)掃描單元下(xià)方上下(xià)移動的(de)平台。在沉積并固化(huà)層之後,掃描儀創建打印表面的(de)深度圖,然後将其與3D模型進行比較,以找出如何調整噴墨單元的(de)沉積速率,以消除任何不規則性。前一層樹脂過多(duō)的(de)區(qū)域在下(xià)一層樹脂過少,反之亦然。
領導這(zhè)項研究的(de)蘇黎世聯邦理(lǐ)工學院機器人(rén)學教授Robert Katzschmann說,這(zhè)意味著(zhe)打印機在材料沉積後不需要與材料接觸。“這(zhè)帶來(lái)了(le)各種好處,因爲現在你可(kě)以使用(yòng)聚合時(shí)間更長(cháng)、硬化(huà)時(shí)間更長(cháng)的(de)化(huà)學物(wù)質,這(zhè)爲更有用(yòng)的(de)材料開辟了(le)一個(gè)全新的(de)空間。
“實際上,我們現在可(kě)以一次創建一個(gè)結構或機器人(rén)。這(zhè)可(kě)能需要在這(zhè)裏或那裏添加一個(gè)電機,但結構的(de)實際複雜(zá)性就在那裏。”--羅伯特·卡茨曼
此前,Inkbit一直在使用(yòng)掃描方法,一次隻能捕獲2厘米寬的(de)區(qū)域的(de)圖像。在将所有圖像拼接在一起并進行分(fēn)析之前,必須多(duō)次重複此過程,這(zhè)大(dà)大(dà)縮短了(le)制造時(shí)間。這(zhè)項新技術使用(yòng)了(le)一種更快(kuài)的(de)激光(guāng)掃描系統,該設備現在的(de)打印速度是以前的(de)660倍。此外,該團隊現在已經證明(míng),他(tā)們可(kě)以使用(yòng)稱爲硫醇烯的(de)彈性聚合物(wù)進行打印。這(zhè)些材料固化(huà)緩慢(màn),但它們比丙烯酸酯(通(tōng)常用(yòng)于商用(yòng)3D噴墨打印機的(de)橡膠狀材料)更有彈性,更耐用(yòng)。
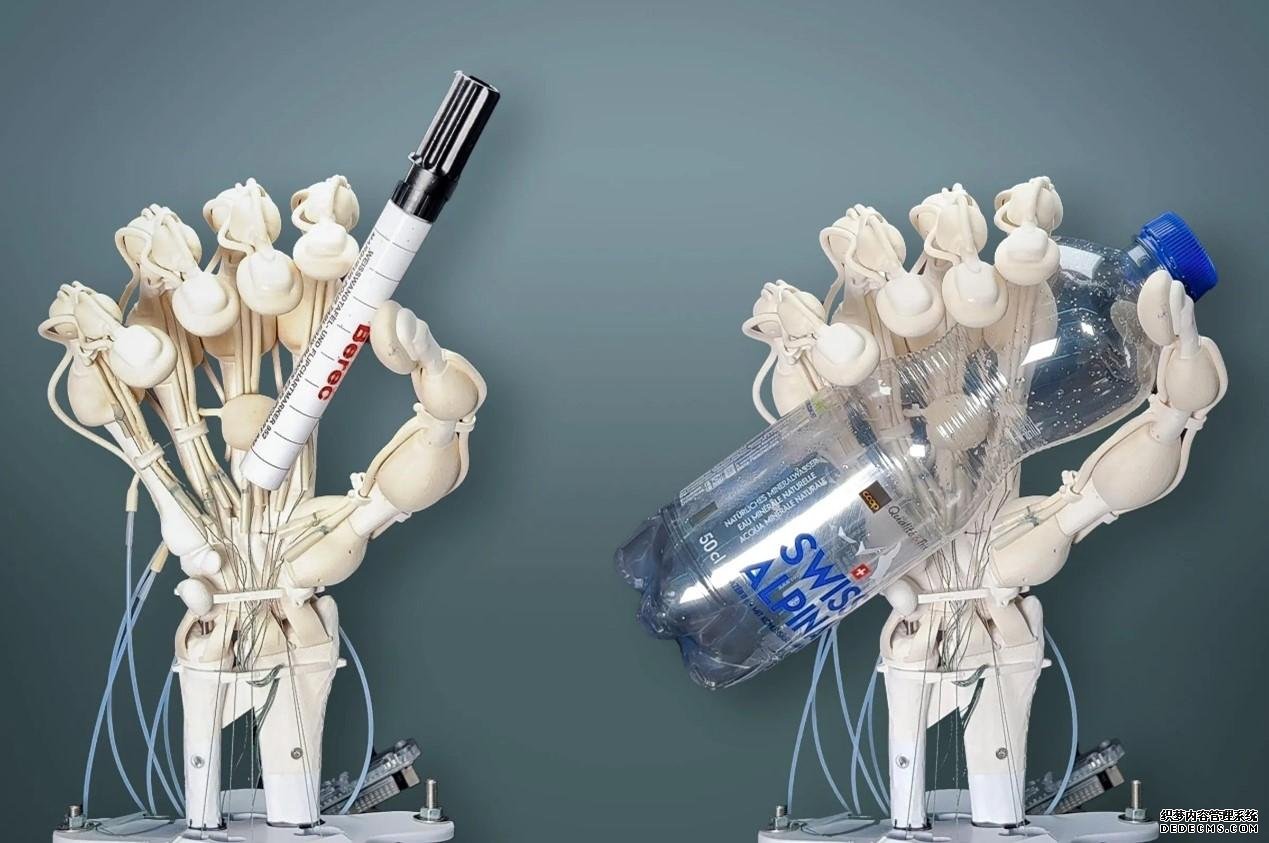
爲了(le)展示新的(de)3D打印工藝的(de)潛力,研究人(rén)員(yuán)打印了(le)一隻機械手。該設備的(de)特點是以人(rén)手的(de)MRI掃描爲模型的(de)剛性骨骼和(hé)彈性肌腱,這(zhè)些肌腱可(kě)以連接到伺服機構,使手指向手掌方向彎曲。每個(gè)指尖都有一層薄膜,薄膜後面有一個(gè)小空腔,與印在手指結構中的(de)長(cháng)管相連。當手指接觸到什(shén)麽東西時(shí),空腔被壓縮,導緻管道内的(de)壓力上升。這(zhè)是由管子末端的(de)壓力傳感器檢測到的(de),該信号用(yòng)于告訴手指在達到一定壓力後停止卷曲。
研究人(rén)員(yuán)用(yòng)手抓握各種物(wù)體,包括鋼筆和(hé)水(shuǐ)瓶,并用(yòng)拇指觸摸指尖。至關重要的(de)是,除了(le)伺服系統和(hé)壓力傳感器外,機械手的(de)所有功能部件都是在一次打印作業中生産的(de)。Katzschmann說:“我們認爲我們的(de)工作新穎之處在于,我們現在可(kě)以一次創建一個(gè)結構或機器人(rén)。”。“這(zhè)可(kě)能需要在這(zhè)裏或那裏添加一個(gè)電機,但結構的(de)實際複雜(zá)性就在那裏。”
研究人(rén)員(yuán)還(hái)創造了(le)一個(gè)氣動六條腿的(de)機器人(rén),該機器人(rén)有一個(gè)能夠來(lái)回行走并拿起一盒Tic-Tacs的(de)夾具,還(hái)有一個(gè)模仿人(rén)體心髒的(de)泵,具有單向閥和(hé)内部壓力傳感器,能夠每分(fēn)鐘(zhōng)泵送2.3升流體。
Katzschmann說,未來(lái)的(de)工作将著(zhe)眼于進一步擴大(dà)打印機可(kě)以使用(yòng)的(de)材料的(de)數量。它們僅限于可(kě)以使用(yòng)紫外線固化(huà)的(de)材料,并且粘性不太大(dà),無法在噴墨打印機中工作。但這(zhè)些可(kě)能包括硬環氧樹脂、适用(yòng)于組織工程的(de)水(shuǐ)凝膠,甚至可(kě)以将電子電路打印到設備中的(de)導電聚合物(wù)。

