 400-099-1872
400-099-1872





行業資訊
-
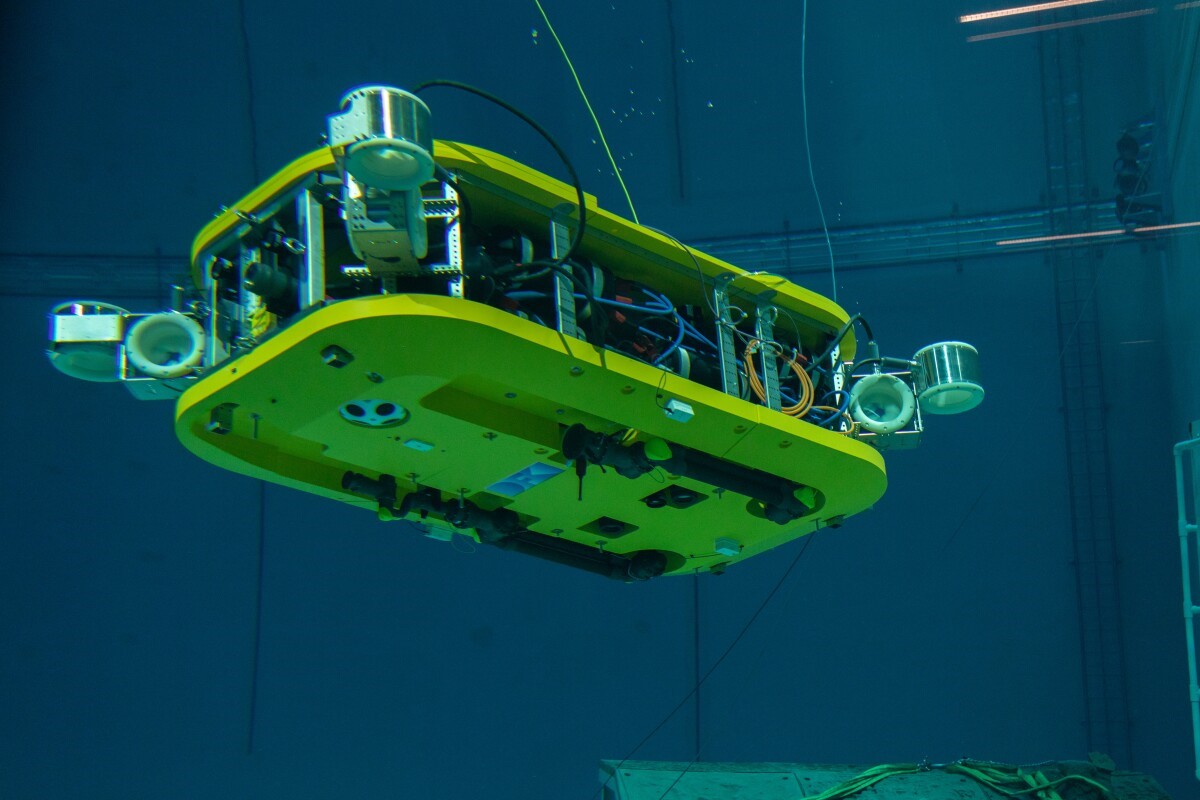
烏賊在其水(shuǐ)平水(shuǐ)下(xià)機器人(rén)模式下(xià)當它翻轉到垂直水(shuǐ)下(xià)機器人(rén)模式時(shí),雙臂折疊到其下(xià)側發揮作...
了(le)解詳情

-
手術機器人(rén)執行世界上第一個(gè)自主腹腔鏡手術
2022-02-09新的(de)和(hé)改進的(de)STAR系統在豬身上進行腸吻合 Johns Hopkins University 雖然機器人(rén)腹腔鏡手術系統确實...
了(le)解詳情

-
恭賀賽途(北京)智能科技有限公司榮獲第二屆中國國際科普作品大(dà)賽
2022-01-28作品名稱:微縮智能網聯汽車 Name of works: Micro smart network connected cars 作品類别:科普展品 作...
了(le)解詳情

-
新型改進蛇形機器人(rén)即将進行海試
2022-01-27Eelume EELY500被送往挪威特隆赫姆峽灣的(de)深處 Eelume 幾年前,我們第一次聽(tīng)說了(le)鳗魚,一種類似鳗...
了(le)解詳情

-
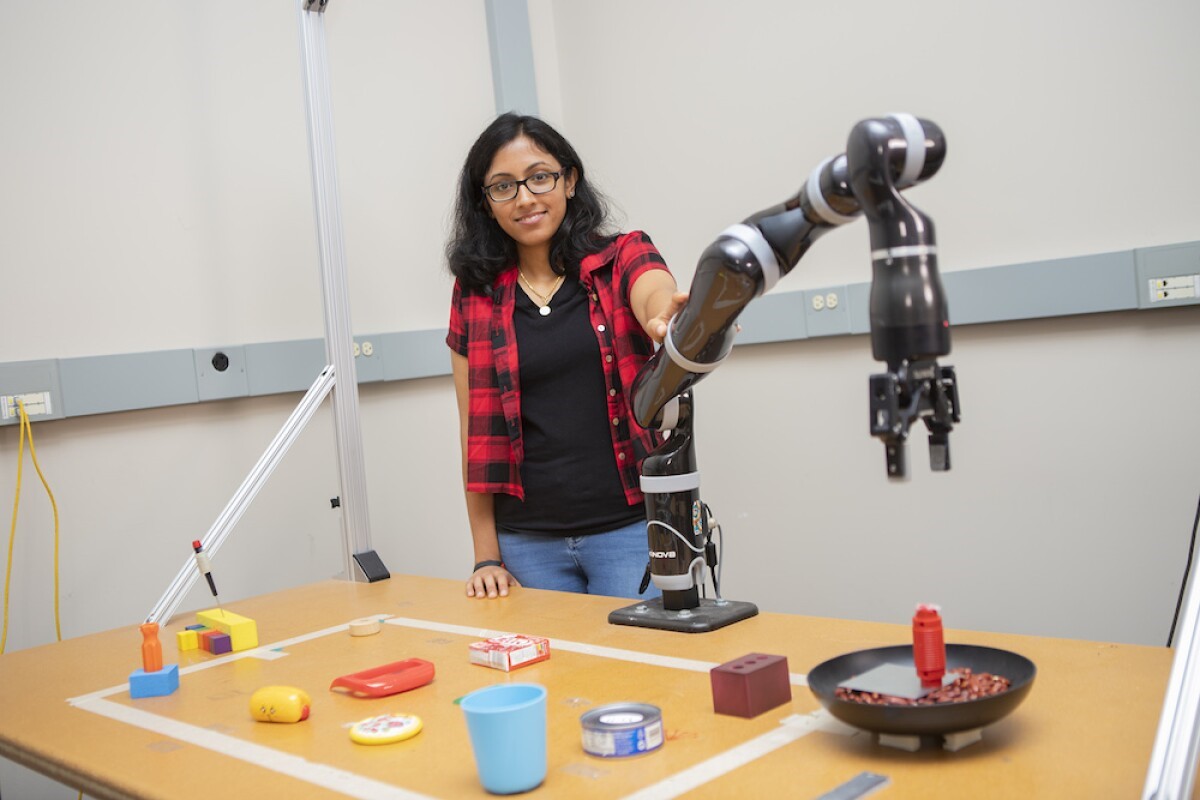
工程師們制造具有基本自我意識的(de)機器人(rén)手臂
2022-01-26研究人(rén)員(yuán)爲機器人(rén)手臂提供了(le)一種基本的(de)自我意識,以幫助它适應新的(de)環境 Columbia Engineering 盡...
了(le)解詳情
-
MacGyver機器人(rén)可(kě)以學習(xí)根據周圍對(duì)象的(de)形式和(hé)功能構建新工具 喬治亞理(lǐ)工學院 機器人(rén)手臂一直...
了(le)解詳情
-
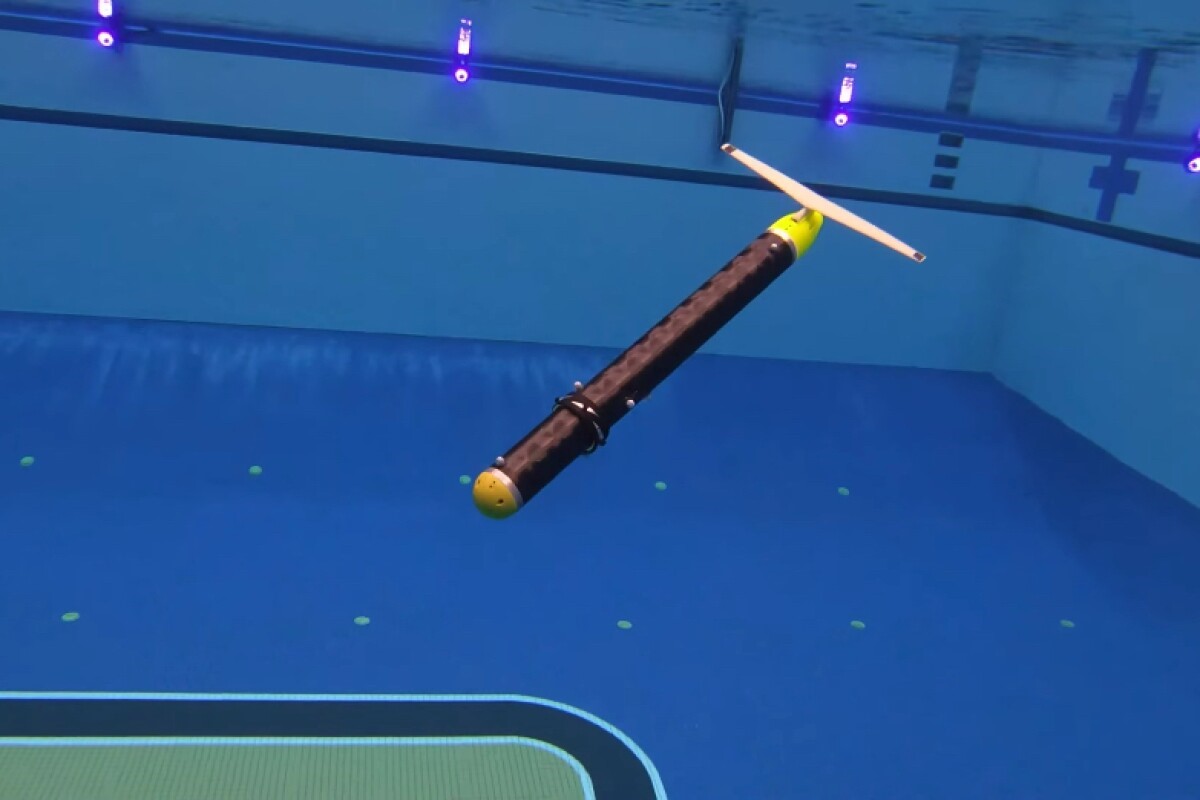
動力“水(shuǐ)下(xià)滑翔機”沒有外部運動部件
2022-01-24粗糙的(de)水(shuǐ)下(xià)滑翔機俯沖 Purdue University 當科學家希望遠(yuǎn)距離收集海洋學數據時(shí)但不幹擾海洋生物(wù)...
了(le)解詳情

-
基于E-PUCK2的(de)群體協作系統
2022-01-21系統簡介 桌面型輪式群體智能協作系統由高(gāo)頻(pín)投影(yǐng)系統、無線通(tōng)訊控制系統、群體智能決策軟...
了(le)解詳情

