 400-099-1872
400-099-1872






四條腿的(de)Magnecko機器人(rén)在水(shuǐ)平和(hé)垂直表面上自主行走 Magnecko/蘇黎世聯邦理(lǐ)工學院
人(rén)們很難近距離親自檢查高(gāo)大(dà)的(de)金屬結構或機器,盡管無人(rén)機可(kě)能會有所幫助,但其電池電量有限是一個(gè)問題。這(zhè)就是磁足Magnecko機器人(rén)的(de)用(yòng)武之地。
這(zhè)款四足機器人(rén)由瑞士蘇黎世聯邦理(lǐ)工學院的(de)八名工程學士學生組成的(de)團隊創建,其靈感來(lái)自壁虎的(de)爬牆和(hé)爬天花闆能力。然而,這(zhè)種蜥蜴使用(yòng)稱爲剛毛的(de)微小毛發狀腳墊結構,而Magnecko則使用(yòng)ETH機器人(rén)系統實驗室開發的(de)特殊永磁體模塊。
每個(gè)模塊由多(duō)個(gè)較小的(de)磁體組成,這(zhè)些磁體可(kě)以通(tōng)過短電脈沖在幾分(fēn)之一秒内重複磁化(huà)和(hé)消磁。重要的(de)是,磁鐵不需要任何電力就可(kě)以保持在任何一種狀态。當被磁化(huà)時(shí),它們也(yě)非常強大(dà)——僅僅一英尺的(de)腳就可(kě)以承受機器人(rén)總重量的(de)2.5倍。
所以,是的(de),這(zhè)個(gè)東西可(kě)以完全颠倒地走。
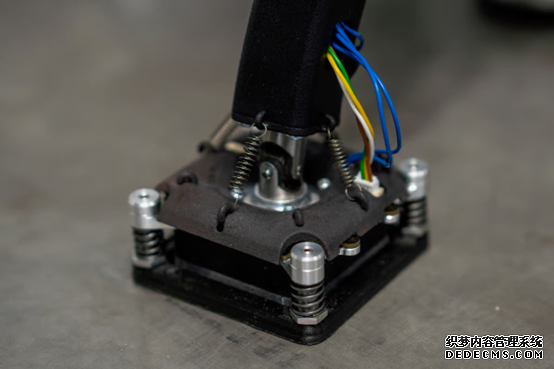
仔細觀察機器人(rén)的(de)一隻彈簧加載、橡膠墊、電磁腳 Magnecko/蘇黎世聯邦理(lǐ)工學院
在目前的(de)版本中,Magnecko必須由運營商使用(yòng)無線手持控制器告知去哪裏。也(yě)就是說,機器人(rén)會自行沿著(zhe)這(zhè)條路線前進,在垂直和(hé)水(shuǐ)平的(de)鐵磁表面上自主過渡。彈簧加載的(de)橡膠腳墊有助于保持抓地力。
未來(lái),計劃要求機器人(rén)能夠自主避障和(hé)路線規劃…它最終可(kě)能做(zuò)的(de)不僅僅是檢查結構。
團隊成員(yuán)Nicolas Faesch告訴我們:“我們計劃首先爲機器人(rén)的(de)檢查工作做(zuò)準備,但沒有什(shén)麽能阻止它在未來(lái)進行自主維護或遠(yuǎn)程操作維修。”“它可(kě)以支撐幾公斤的(de)有效載荷,而且采用(yòng)昆蟲式的(de)配置,可(kě)以根據需要輕松定位。監控也(yě)是一個(gè)非常有趣的(de)用(yòng)例,因爲機器人(rén)可(kě)以在一個(gè)地方挂上幾個(gè)小時(shí)來(lái)執行任務,這(zhè)要歸功于特殊的(de)磁腳,它不需要任何電力就能保持磁化(huà)狀态。”

機器人(rén)可(kě)以配備各種傳感器,包括深度感應攝像頭 Magnecko/蘇黎世聯邦理(lǐ)工學院
aesch及其同事目前正在緻力于改進機器人(rén),并正在與行業專家討(tǎo)論真實世界的(de)測試。您可(kě)以在下(xià)面的(de)視頻(pín)中看到當前的(de)原型。
另一個(gè)磁性足壁步四足機器人(rén)的(de)例子,可(kě)以看看韓國高(gāo)級科學技術研究所的(de)MARVEL。

