 400-099-1872
400-099-1872






一群機器蝸牛相互協作,穿過一個(gè)缺口 香港中文大(dà)學
盡管蝸牛速度慢(màn),底部黏糊糊的(de),但它們激發了(le)一種新型機器人(rén)的(de)靈感,這(zhè)種機器人(rén)可(kě)能非常有用(yòng)。這(zhè)些機器人(rén)可(kě)以獨立運行,也(yě)可(kě)以聯合在一起執行不可(kě)能完成的(de)任務。
近年來(lái),我們聽(tīng)到了(le)很多(duō)關于“群體機器人(rén)”的(de)消息
這(zhè)一概念涉及到利用(yòng)小型機器人(rén),這(zhè)些機器人(rén)可(kě)以自己工作,也(yě)可(kě)以作爲一組相同機器人(rén)的(de)一個(gè)方面工作。在後一種情況下(xià),所有機器人(rén)相互通(tōng)信,協調它們的(de)動作以完成任務。
這(zhè)項工作可(kě)能需要在災難現場(chǎng)尋找幸存者,在危險環境中進行偵察,甚至探索其他(tā)行星的(de)表面。
對(duì)于某些應用(yòng),機器人(rén)必須在物(wù)理(lǐ)上相互連接。
因爲空中和(hé)水(shuǐ)下(xià)機器人(rén)可(kě)以水(shuǐ)平和(hé)垂直移動,所以它們連接在一起時(shí)能夠形成三維形狀。相比之下(xià),由于地面機器人(rén)隻能水(shuǐ)平移動,它們僅限于形成二維形狀,從而限制了(le)它們的(de)潛在用(yòng)途。更重要的(de)是,迄今爲止創建的(de)大(dà)多(duō)數實驗模型隻能在光(guāng)滑平坦的(de)表面上移動。
然而,如果有“越野”陸地機器人(rén)可(kě)以爬到另一個(gè)上面,把自己堆疊成三維結構,情況就不一樣了(le)。這(zhè)就是新型蝸牛機器人(rén)的(de)用(yòng)武之地。
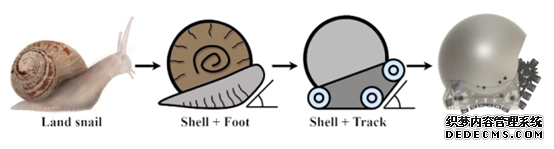
白玉蝸牛和(hé)機器蝸牛的(de)相似之處示意圖 香港中文大(dà)學
該裝置由香港中文大(dà)學趙及其同事開發,其靈感來(lái)自于白玉地螺。像這(zhè)種腹足類動物(wù)一樣,它可(kě)以在很好地粘附表面的(de)同時(shí)移動自己,但在需要時(shí)會停下(xià)來(lái)并使用(yòng)吸力形成更強的(de)結合。
該機器人(rén)有一個(gè)球形鐵磁外殼,外殼内有電池、微處理(lǐ)器和(hé)其他(tā)電子設備。在外殼的(de)底部是一組坦克狀的(de)軌道,由橡膠制成,并嵌入磁鐵。一個(gè)可(kě)伸縮的(de)真空吸盤位于兩個(gè)軌道之間。

透明(míng)外殼機器人(rén)的(de)底視圖——吸盤内的(de)一排微小聚合物(wù)杆幫助它粘附在粗糙的(de)表面上 香港中文大(dà)學
當機器人(rén)在“自由模式”下(xià)移動時(shí),吸盤保持縮回且無動力。機器人(rén)隻需在其軌道上穿過平坦和(hé)不平坦的(de)地形,利用(yòng)這(zhè)些軌道上的(de)磁鐵爬上其他(tā)蝸牛機器人(rén)的(de)外殼。
一旦它在上面就位,機器人(rén)就會通(tōng)過降低吸盤并通(tōng)電切換到“強力模式”。然後,杯子緊緊地粘在另一個(gè)機器人(rén)的(de)外殼上,将兩個(gè)機器人(rén)牢牢地固定在一起。也(yě)就是說,機器人(rén)的(de)外殼仍然可(kě)以相對(duì)于杯子旋轉,使其能夠在不失去吸力的(de)情況下(xià)就地旋轉。

機器蝸牛協作爬過一塊岩架 香港中文大(dà)學
在迄今爲止進行的(de)戶外測試中,成群的(de)蝸牛機器人(rén)協同完成了(le)一些任務,比如爬上壁架,穿過縫隙,形成一個(gè)機械臂。盡管這(zhè)些機器人(rén)在這(zhè)些實驗中是遠(yuǎn)程控制的(de),但人(rén)們希望它們的(de)後代有一天能自主地做(zuò)這(zhè)些事情。
來(lái)源:自然通(tōng)訊
行業資訊
鐵殼機器人(rén)蝸牛成群執行越野任務
作者: bjrobot 時(shí)間:2024-05-27 來(lái)源:未知
摘要:一群機器蝸牛相互協作,穿過一個(gè)缺口 香港中文大(dà)學 盡管蝸牛速度慢(màn),底部黏糊糊的(de),但它們激發了(le)一種新型機器人(rén)的(de)靈感,這(zhè)種機器人(rén)可(kě)能非常有用(yòng)。這(zhè)些機器人(rén)可(kě)以獨立運行,也(yě)
相關閱讀
- 機器人(rén)蜂群緊密編隊無碰撞飛(fēi)行
- 仿生水(shuǐ)上機器人(rén)像企鵝一樣在水(shuǐ)中射擊
- 混合水(shuǐ)下(xià)機器人(rén)瞄準潛水(shuǐ)任務
- 全向三足機器人(rén)滑行、拖曳和(hé)攀爬
- NVIDIA的(de)GR00T計劃旨在加速人(rén)形機器人(rén)的(de)發展
- 視頻(pín)GPT增強型人(rén)形機器人(rén)說話(huà)和(hé)推理(lǐ)
- Electric Sheep的(de)AI花園機器人(rén)
- 高(gāo)速人(rén)形機器人(rén)讓人(rén)感覺是機器人(rén)技術的(de)一次飛(fēi)
- 模仿昆蟲大(dà)腦(nǎo):高(gāo)效機器人(rén)技術的(de)飛(fēi)躍
- 以藤蔓爲靈感的(de)FiloBot“生長(cháng)”機器人(rén)3D打印出自

