 400-099-1872
400-099-1872





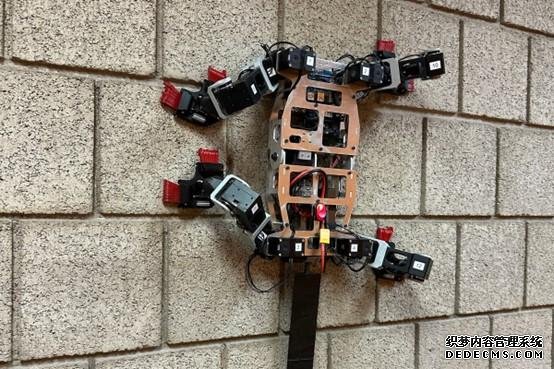
LORIS機器人(rén),圖爲攀爬混凝土牆 卡内基梅隆大(dà)學
科學家們創造了(le)一種以生物(wù)爲靈感的(de)四腳機器人(rén),它能像其他(tā)機器人(rén)一樣攀爬。它利用(yòng)一種獨特的(de)機制緊貼粗糙的(de)垂直表面,這(zhè)種機制非常有效,但同時(shí)相對(duì)簡單。
雖然一些實驗機器人(rén)利用(yòng)基于吸力的(de)抓取系統來(lái)攀爬光(guāng)滑的(de)表面,但這(zhè)種技術在岩石等無法形成密封的(de)粗糙表面上不起作用(yòng)。
一種替代方案是使用(yòng)所謂的(de)微型夾具。這(zhè)些包括一系列微小的(de)尖銳鈎子,可(kě)以鈎住被攀爬表面的(de)小角落和(hé)縫隙。當夾具被提起以進行下(xià)一步操作時(shí),鈎子會從該表面松開。
一些微型抓取器是被動的(de),依靠機器人(rén)懸挂體的(de)重量來(lái)保持抓取。這(zhè)種類型在相對(duì)平坦的(de)牆壁上可(kě)以工作,但在更不規則的(de)表面(如懸崖面)上很難工作,這(zhè)需要更多(duō)樣的(de)攀爬策略。
主動微型夾具通(tōng)過結合電動執行器來(lái)繞過這(zhè)一限制,電動執行器有目的(de)地将一圈鈎子沉入表面,從而保持在任何方向上工作的(de)電動握持。然而,這(zhè)些抓握器往往體積龐大(dà)、耗能大(dà)、機械複雜(zá),加上它們的(de)攀爬速度相當慢(màn)。
這(zhè)就是LORIS四足機器人(rén)的(de)用(yòng)武之地。

LORIS是與美(měi)國國家航空航天局合作開發的(de),著(zhe)眼于探索其他(tā)行星 卡内基梅隆大(dà)學
該設備由卡内基梅隆大(dà)學機器人(rén)力學實驗室的(de)Paul Nadan、Spencer Backus、Aaron M.Johnson及其同事創建,以一種攀爬的(de)有袋動物(wù)命名,也(yě)以“不規則斜坡的(de)輕型觀測機器人(rén)”命名。
機器人(rén)四條腿的(de)末端各有一個(gè)張開的(de)微型棘夾具,包含兩組相互成直角排列的(de)棘。夾持器通(tōng)過一個(gè)被動腕關節連接到腿上。這(zhè)基本上意味著(zhe),無論腿在做(zuò)什(shén)麽,夾子都會随著(zhe)動作而擺動。

LORIS的(de)每個(gè)微型魚鈎都由一個(gè)魚鈎組成,魚鈎封裝在3D打印的(de)塑料機身中 卡内基梅隆大(dà)學
研究人(rén)員(yuán)表示,LORIS将被動微型夾持器的(de)重量輕、速度快(kuài)、能效高(gāo)、簡單性與主動夾持器牢固的(de)握持和(hé)适應性相結合。此外,該機器人(rén)的(de)設計簡單,制造成本低廉。
資料來(lái)源:卡内基梅隆大(dà)學
www.bjrobot.com

